请问如何初始化?
-
@veye_xumm
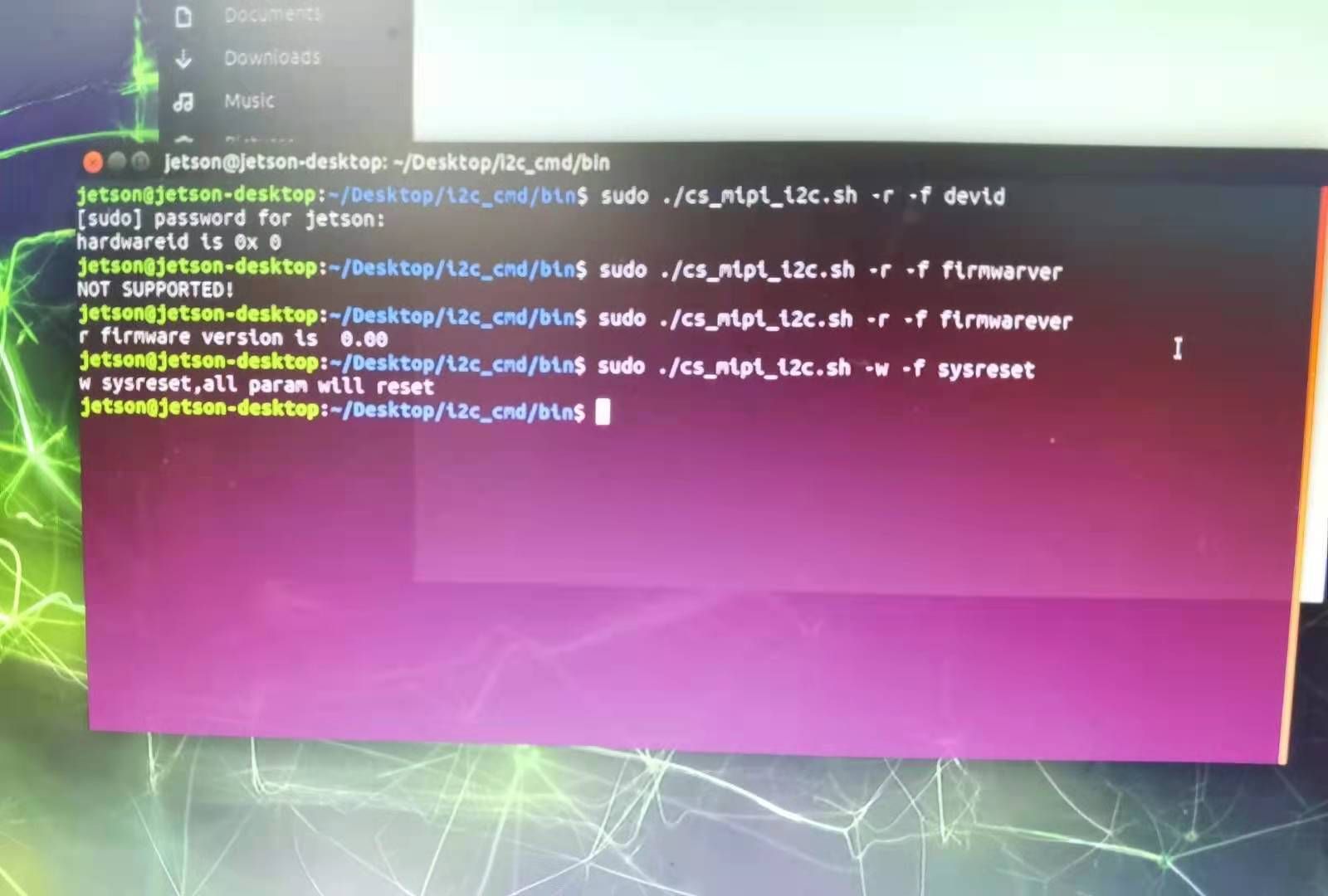
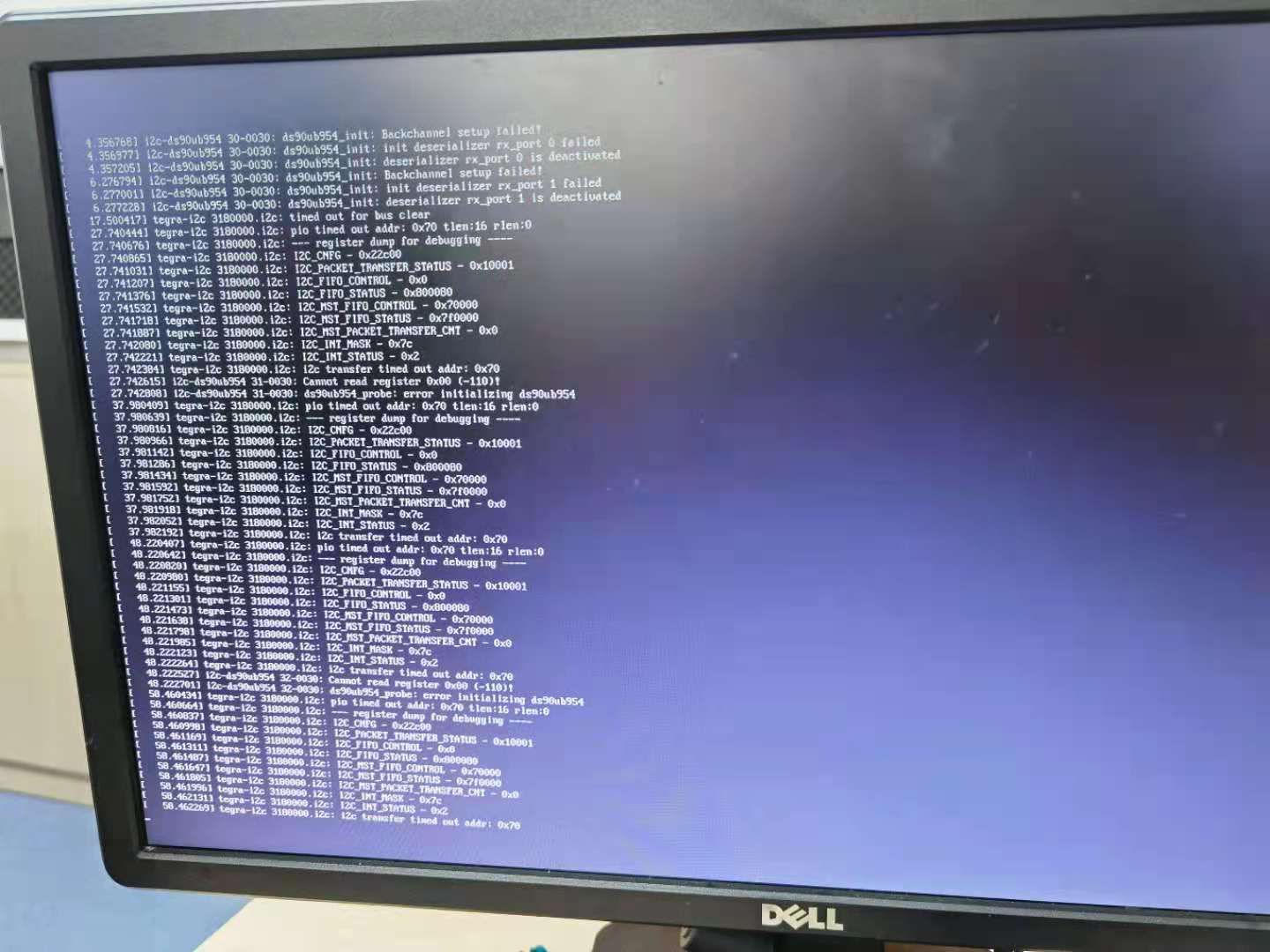
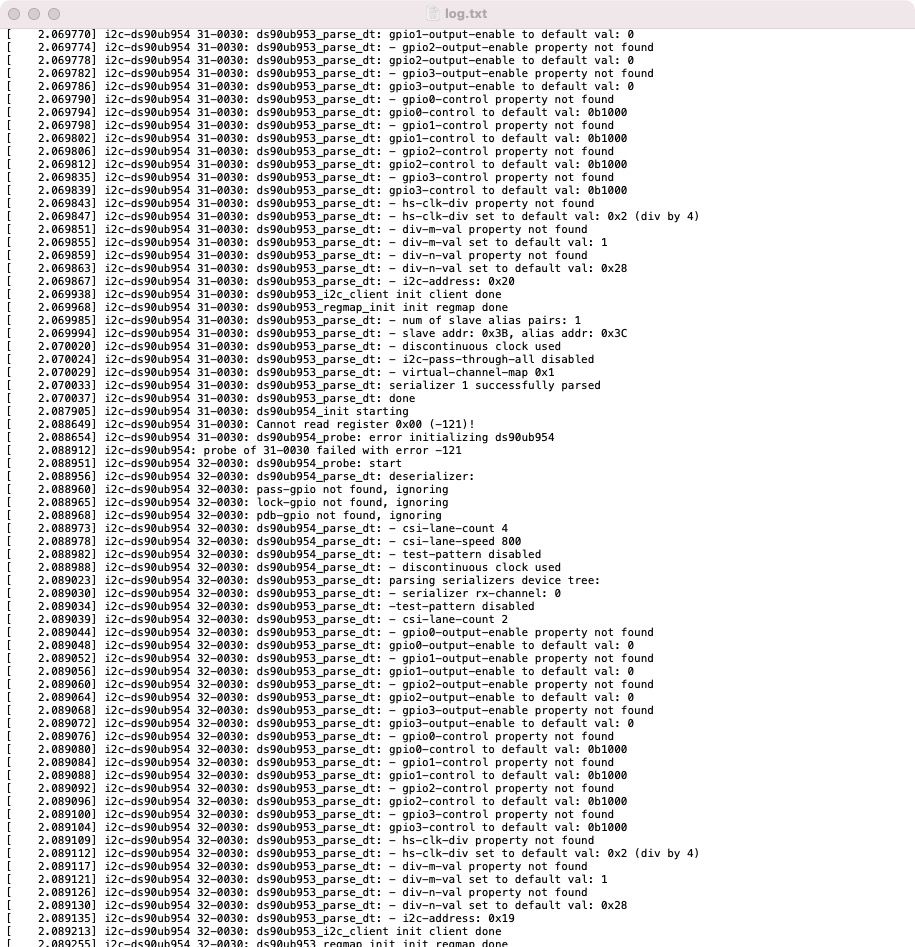
按照你说的,我们想将CS-MIPI-IMX307单板直接连接到jetson上,但是不知道怎么连接,现在还是通过954连接到jetson,并且根据WIKI的教程尝试了一些命令,得到的信息如上图,读到很多零,而且感觉没有重置成功,想问一下接下来怎么操作? -
@wqeeqweqwwccsd
首先要确认一下你这个307到底现在i2c地址是多少。
用如下命令:i2c_detect -y -r [i2c_bus]i2c_bus的值,不同板子不同。我们wiki上有详细说明。
-
@veye_xumm 我们把IMX307单板连接树莓派想恢复出厂设置,但是实在不知道怎样命令查找i2c地址,按照之前提供的教程,无法查找到,请问怎么操作
-
@wqeeqweqwwccsd 用了命令想恢复,但是很多都是地址为FF
-
@wqeeqweqwwccsd
树莓派上,连接摄像头的i2c总线,bus num应该是10,老一些的是0.
你需要下载我们树莓派平台的一个脚本,跟jetson平台的差不多。
https://github.com/veyeimaging/raspberrypi/tree/master/i2c_cmdi2c_detect -y [bus_num]看到有0x3b地址的设备,应该就是摄像头默认地址。
-
@veye_xumm 经过昨天的排查,我们发现有一个954的板子是好的,其余两个954板子是无法正常播放画面,情况是这样的,我们把954以及同一个摄像头连接ADN-N3四口板子插在xavier上,第一块954板子摄像头正常显示画面,换用第二块954板子,同样的摄像头同样的接口就无法显示画面了,是不是954也有方法恢复出厂设置呢?我们有树莓派和xavier,只要能恢复出厂设置用什么都行,请问方法是怎样的,有没有教程?
-
@wqeeqweqwwccsd
954这个板子本身并没有存储配置信息的功能。也就没有恢复出厂设置这么一说了。
请核实几个事情。- 这几个954板子都是我们的FPD-LINK3-2RX对吧。
- 使用最新版本的Image和dtb。
- 每次操作硬件连接,记得先断电。
- 首先给954板子上电,然后再给jeson或者rpi上电。同时上电也可以。
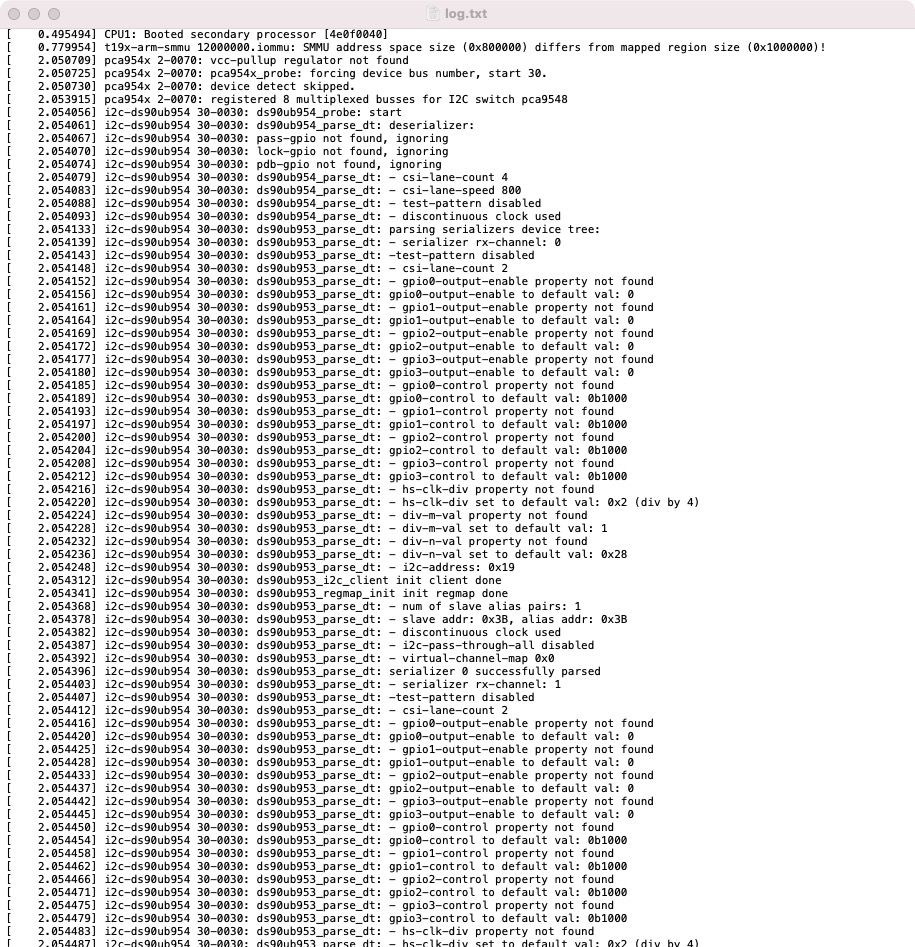
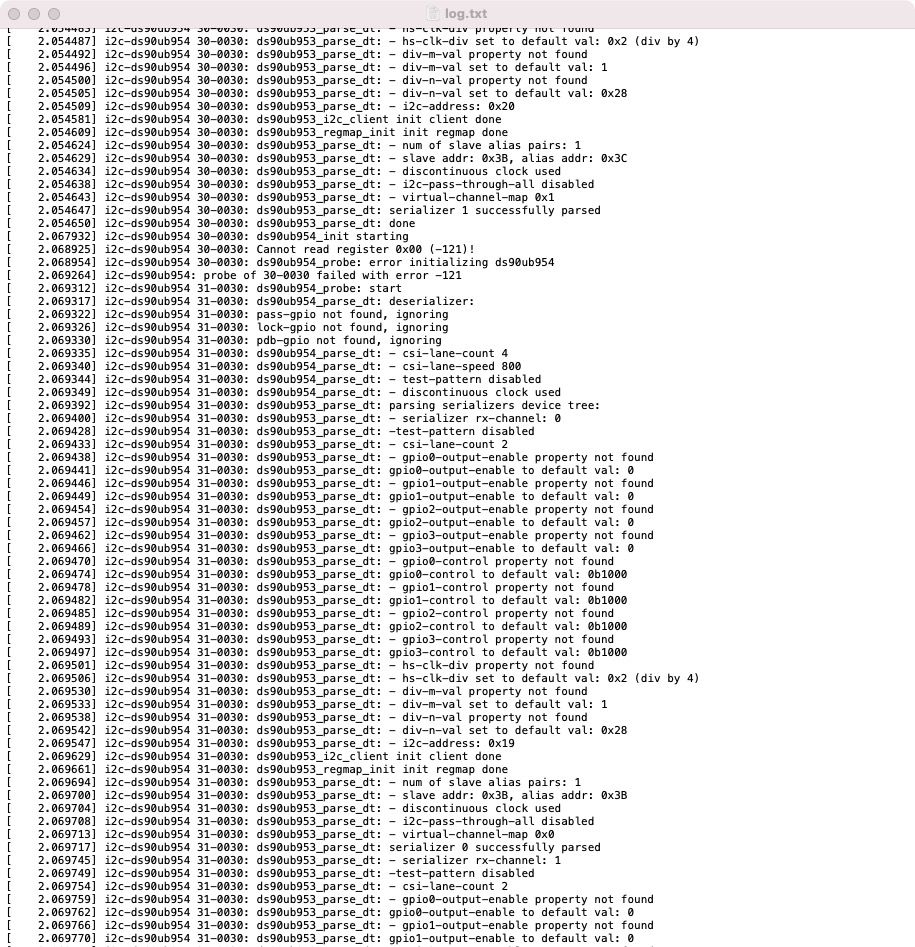
如果以上都做到了,还是有问题。请将有问题的dmesg导出文件,post上来。
-
-
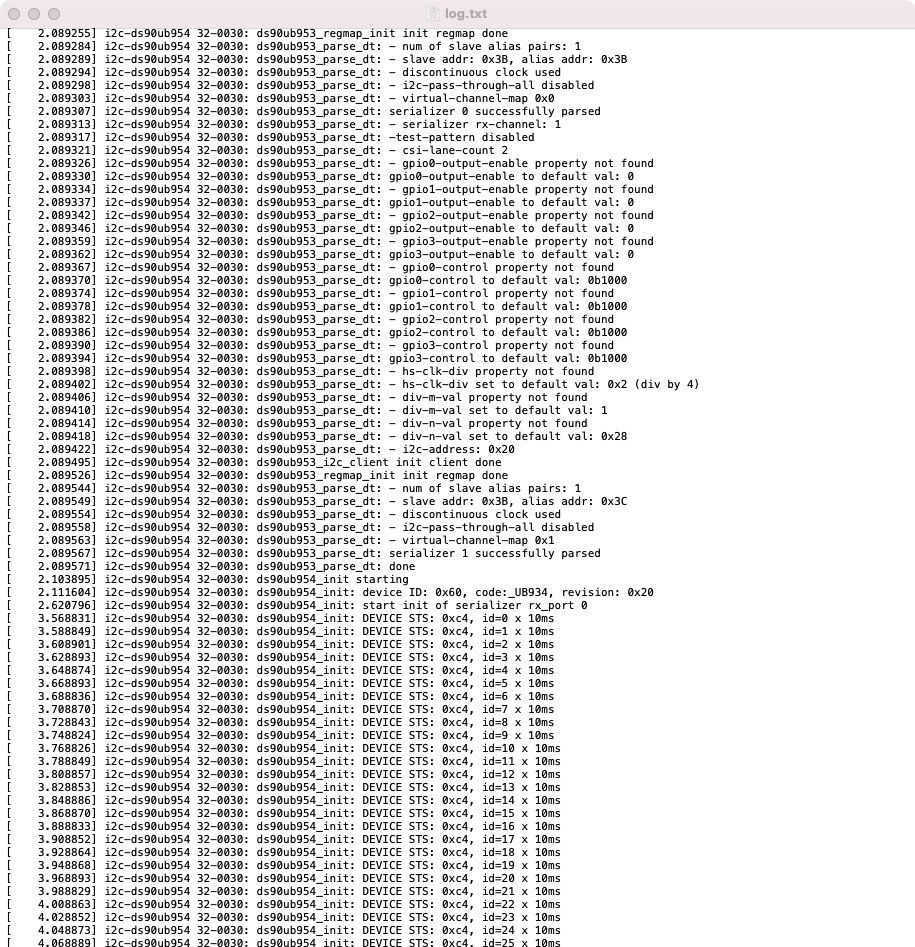
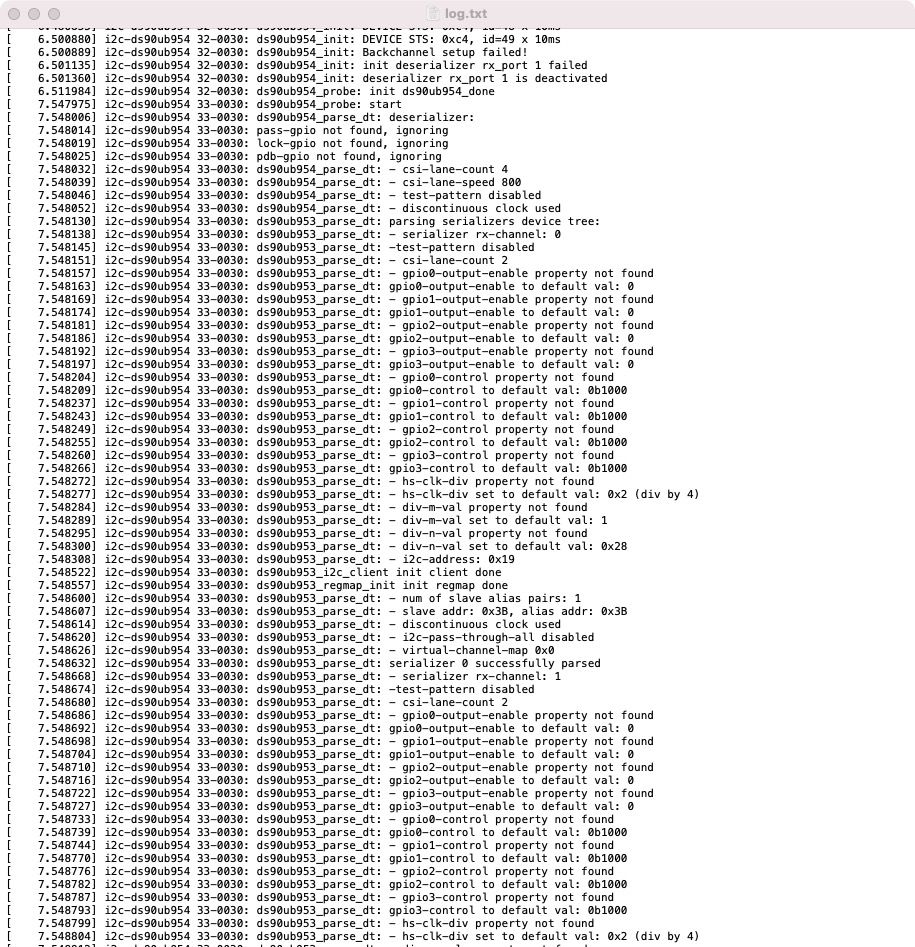
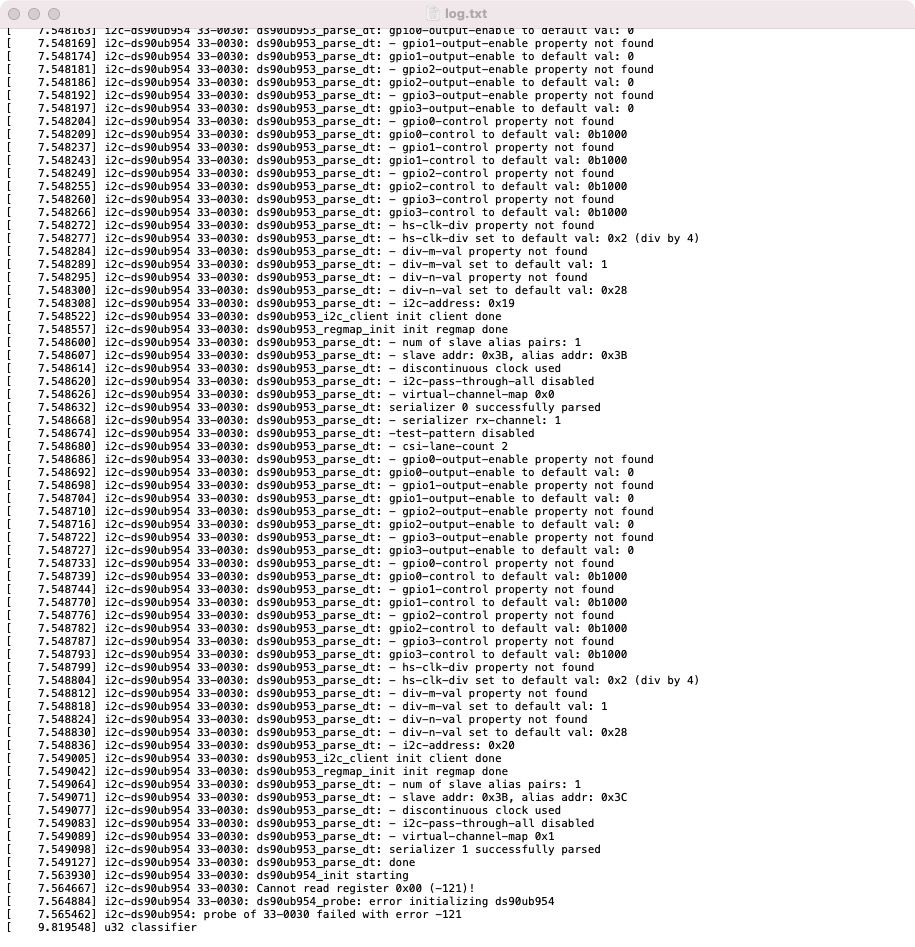
下面是一个IMX307连接954板子连接ADN-N3的报错
-
另外请问能不能通过954的两个gpio分别对两个摄像头进行framesync呢
-
-
@wqeeqweqwwccsd
你这个日志是正常插了一个摄像头的日志,有一个插口正常probe到了954,并且也配置了对端的摄像头。
你说的同步功能,我们已经做了。
具体见:
http://wiki.veye.cc/index.php/FPD_LINK_III_for_Jetson/zh#CS-FPD-CAM-IMX307.E7.9A.84.E5.90.8C.E6.AD.A5.E6.A8.A1.E5.BC.8F.EF.BC.8C.E8.BF.9E.E6.8E.A5.E5.88.B0Jetson_AGX_Xavier -
@veye_xumm 通过两个954上的GPIO,输入两个不同的trigger信号,分别对两个953同步呢?
-
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login