IMX287延迟问题
-
我购买了MV-MIPI-IMX287M相机,并接入到了正点原子RK3588的开发板。在默认配置的基础上,我只修改了曝光为手动曝光,时间为5毫秒

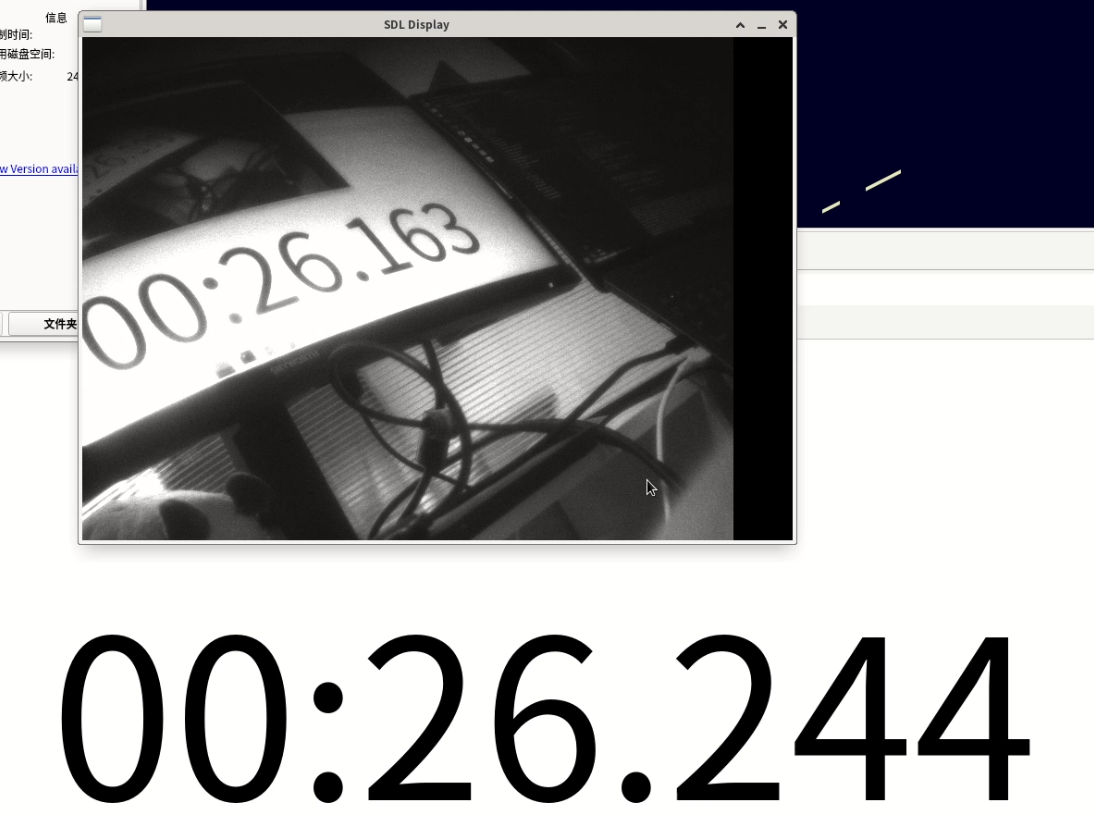
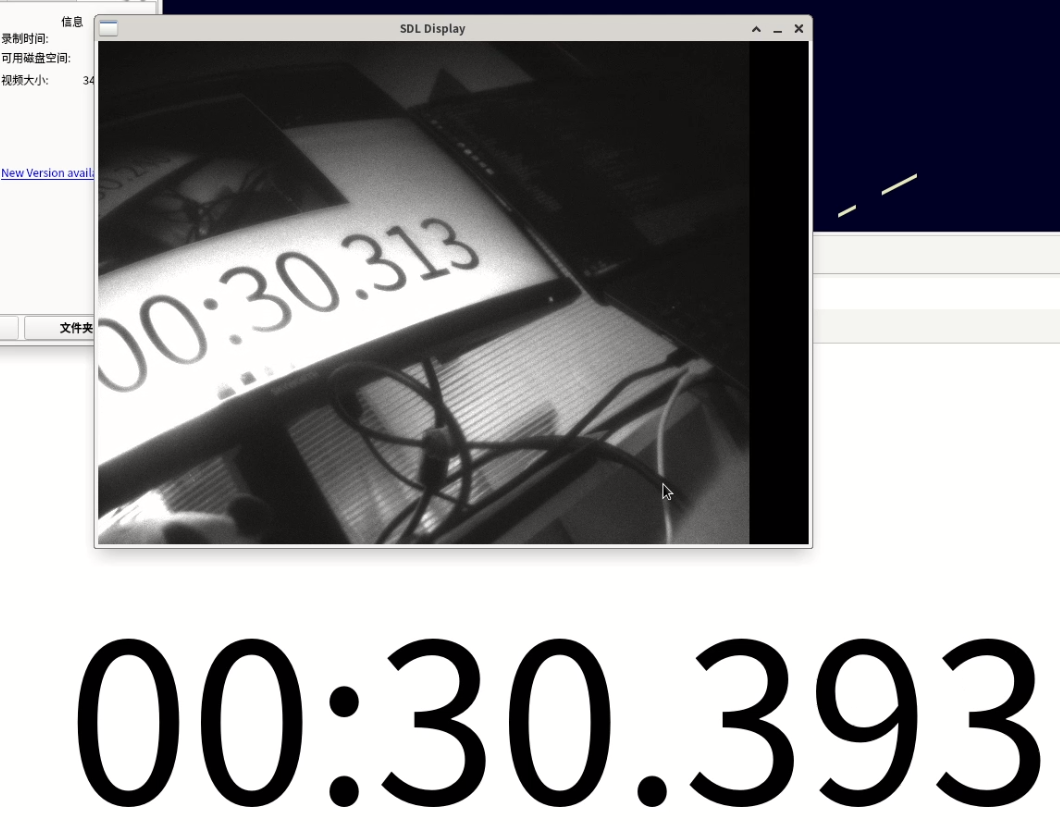
通过V4L2读取相机数据,并通过SDL库,使用HDMI显示实时画面,发现出图延迟约为80ms,如下图所示。这要高于我们之前使用的USB3.0 工业相机(使用同样的IMX287传感器,从捕获到显示信息约50-60ms)
产品链接如下:http://www.cldkey.com/USB3camera/369.html
请问我测得的延时是合理的吗,有没有办法降低出图的延时,我们想用在目标的高精度跟踪下,可以牺牲画质,分辨率。
使用同样的传感器,MIPI相机的出图延迟是不是应该比USB3.0的相机要小呢?
这是我编写的相机数据采集代码// v4l2_reader.h #define BUFFER_COUNT 1 struct buffer { void *start; size_t length; }; class V4l2Reader : public VideoReaderManager { public: V4l2Reader(); ~V4l2Reader(); cv::Mat get_image() override; private: int video_fd = -1; int subdev_fd = -1; struct buffer buffers[BUFFER_COUNT]; enum v4l2_buf_type type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE; }; // v4l2_reader.cpp V4l2Reader::V4l2Reader() { subdev_fd = open("/dev/v4l-subdev2", O_RDWR); if (subdev_fd < 0) { perror("Failed to open subdev"); return; } struct v4l2_subdev_format fmt = { .which = V4L2_SUBDEV_FORMAT_ACTIVE, .pad = 0, .format = { .width = 704, .height = 544, .code = MEDIA_BUS_FMT_Y8_1X8, .field = V4L2_FIELD_NONE, .colorspace = V4L2_COLORSPACE_DEFAULT, }, }; if (ioctl(subdev_fd, VIDIOC_SUBDEV_S_FMT, &fmt) < 0) { perror("Failed to set subdev format"); return; } video_fd = open("/dev/video0", O_RDWR); if (video_fd < 0) { perror("Failed to video device"); return; } // 请求缓冲区 struct v4l2_requestbuffers req = {0}; req.count = BUFFER_COUNT; req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE; req.memory = V4L2_MEMORY_MMAP; if (ioctl(video_fd, VIDIOC_REQBUFS, &req) < 0) { perror("Failed to request video buf"); return; } // 映射缓冲区 for (int i = 0; i < BUFFER_COUNT; ++i) { struct v4l2_buffer buf = {0}; struct v4l2_plane plane = {0}; buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE; buf.memory = V4L2_MEMORY_MMAP; buf.index = i; buf.length = 1; buf.m.planes = &plane; if (ioctl(video_fd, VIDIOC_QUERYBUF, &buf) < 0) { perror("Failed to request query buf"); return; } buffers[i].length = plane.length; buffers[i].start = mmap(NULL, plane.length, PROT_READ | PROT_WRITE, MAP_SHARED, video_fd, plane.m.mem_offset); if (buffers[i].start == MAP_FAILED) { perror("mmap"); return; } } for (int i = 0; i < BUFFER_COUNT; ++i) { struct v4l2_buffer buf = {0}; struct v4l2_plane plane = {0}; buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE; buf.memory = V4L2_MEMORY_MMAP; buf.index = i; buf.length = 1; buf.m.planes = &plane; if (ioctl(video_fd, VIDIOC_QBUF, &buf) < 0) { perror("Failed to insert buf"); return; } } if (ioctl(video_fd, VIDIOC_STREAMON, &type) < 0) { perror("Failed to start streaming"); return; } } V4l2Reader::~V4l2Reader() { if (ioctl(video_fd, VIDIOC_STREAMOFF, &type) < 0) { perror("Failed to stop streaming"); } for (int i = 0; i < BUFFER_COUNT; ++i) { munmap(buffers[i].start, buffers[i].length); } close(subdev_fd); close(video_fd); } cv::Mat V4l2Reader::get_image() { cv::Mat mat(544, 768, CV_8UC1); struct v4l2_buffer buf = {0}; struct v4l2_plane plane = {0}; buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE; buf.memory = V4L2_MEMORY_MMAP; buf.length = 1; buf.m.planes = &plane; if (ioctl(video_fd, VIDIOC_DQBUF, &buf) < 0) { perror("DQBUF failed"); return mat; } memcpy(mat.data, buffers[buf.index].start, 768 * 544); cv::cvtColor(mat, mat, cv::COLOR_GRAY2BGR); if (ioctl(video_fd, VIDIOC_QBUF, &buf) < 0) { perror("Failed to requeue buffer"); } return mat; } // main.cpp int main() { std::shared_ptr<V4l2Reader> v4l2_reader = std::make_shared<V4l2Reader>(); std::shared_ptr<SdlImshow> sdl_imshow = std::make_shared<SdlImshow>(768, 544); cv::Mat frame; while (1) { frame = v4l2_reader->get_image(); sdl_imshow->imshow(frame); } return 0; } -
@linoooooo 你好,我们的相机内部isp流程是没有整帧缓存的,相机本身引入的delay是毫秒之内。
我觉得你这个延时主要是v4l2取图缓存和显示缓存的缘故。不过说实话SDL库我们不太懂,怎样优化需要您自己研究一下。
至于相机采集后,您这边程序直接导入算法的话,延迟肯定要比这种测量方法小的多。
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login