@veye_xumm 地址是什么?
潘
Posts made by 潘阳刚
-
RE: 相机抓图相关问题posted in Rockchip App camera
capture.txt @veye_xumm 我没有直接替换,原始文件和您给我的文件只有如下几处不一样,我进行了修改:
绿色的几行本不在原始文件中。
其他有区别但是我未作改动的:

其他的都一致。现在的问题有没有可能是转接板PCB设计不恰当导致的?
capture.txt -
RE: 相机抓图相关问题posted in Rockchip App camera
@veye_xumm 确实缺少支持,我修改了这个文件。重新烧录镜像之后再次尝试,现在的log是这样的:
v4l2-ctl -d /dev/video0 --set-fmt-video=width=1080,height=1280,pixelformat=GREY --stream-mmap --stream-count=1 --stream-to=y8-1088x1280.raw [ 1189.005947] rockchip-csi2-dphy csi2-dcphy0: csi2_dphy_update_sensor_mbus fail to get dphy param, used default value [ 1189.009415] rockchip-csi2-dphy csi2-dcphy0: csi2_dphy_update_sensor_mbus fail to get dphy param, used default value [ 1189.009978] rockchip-mipi-csi2 fdd10000.mipi0-csi2: stream on, src_sd: 000000002ff232b9, sd_name:rockchip-csi2-dphy0 [ 1189.010005] rockchip-mipi-csi2 fdd10000.mipi0-csi2: stream ON [ 1189.010037] rockchip-csi2-dphy csi2-dcphy0: csi2_dphy_update_sensor_mbus fail to get dphy param, used default value [ 1189.010057] rockchip-csi2-dphy csi2-dcphy0: csi2_dphy_update_sensor_mbus fail to get dphy param, used default value [ 1189.010084] rockchip-csi2-dphy csi2-dcphy0: csi2_dphy_update_sensor_mbus fail to get dphy param, used default value <[ 1189.032767] rockchip-mipi-csi2 fdd10000.mipi0-csi2: stream off, src_sd: 000000002ff232b9, sd_name:rockchip-csi2-dphy0 [ 1189.032803] rockchip-mipi-csi2 fdd10000.mipi0-csi2: stream OFF还是没能获取到图像数据。
-
相机抓图相关问题posted in Rockchip App camera
我尝试做转接板让edge2开发板支持raw-mipi-sc132m相机。
编译好驱动后,更改设备树如下:// SPDX-License-Identifier: (GPL-2.0+ OR MIT) / { vcc_mipidphy0: vcc-mipidcphy0-regulator {//cam2-sc132m status = "okay"; compatible = "regulator-fixed"; gpio = <&gpio1 RK_PB2 GPIO_ACTIVE_HIGH>; pinctrl-names = "default"; pinctrl-0 = <&mipidphy0_pwr>; regulator-name = "vcc_mipidphy0"; enable-active-high; regulator-always-on; }; }; &csi2_dcphy0 {//cam2 status = "okay"; ports { #address-cells = <1>; #size-cells = <0>; port@0 { reg = <0>; #address-cells = <1>; #size-cells = <0>; mipi_in_dcphy0: endpoint@1 { reg = <1>; remote-endpoint = <&mvcam_out0>; data-lanes = <1 2>; }; }; port@1 { reg = <1>; #address-cells = <1>; #size-cells = <0>; csidcphy0_out: endpoint@0 { reg = <0>; remote-endpoint = <&mipi0_csi2_input>; }; }; }; }; &mipi_dcphy0 { status = "okay"; }; &csi2_dcphy1 {//cam1 status = "okay"; ports { #address-cells = <1>; #size-cells = <0>; port@0 { reg = <0>; #address-cells = <1>; #size-cells = <0>; mipi_in_dcphy1: endpoint@1 { reg = <1>; remote-endpoint = <&imx415f_out1>; data-lanes = <1 2 3 4>; }; }; port@1 { reg = <1>; #address-cells = <1>; #size-cells = <0>; csidcphy1_out: endpoint@0 { reg = <0>; remote-endpoint = <&mipi1_csi2_input>; }; }; }; }; &mipi_dcphy1 { status = "okay"; }; &csi2_dphy0 {//cam3 status = "okay"; ports { #address-cells = <1>; #size-cells = <0>; port@0 { reg = <0>; #address-cells = <1>; #size-cells = <0>; mipidphy0_in_ucam0: endpoint@1 { reg = <1>; remote-endpoint = <&imx415c_out0>; data-lanes = <1 2 3 4>; }; }; port@1 { reg = <1>; #address-cells = <1>; #size-cells = <0>; csidphy0_out: endpoint@0 { reg = <0>; remote-endpoint = <&mipi2_csi2_input>; }; }; }; }; &csi2_dphy0_hw { status = "okay"; }; &i2c4 {//cam2 status = "okay"; pinctrl-names = "default"; pinctrl-0 = <&i2c4m3_xfer>; dw9714b: dw9714b@c { compatible = "dongwoon,dw9714"; status = "disable"; reg = <0x0c>; pinctrl-names = "focusb_gpios"; pinctrl-0 = <&focusb_gpio>; focus-gpios = <&gpio1 RK_PA0 GPIO_ACTIVE_HIGH>; rockchip,vcm-start-current = <20>; rockchip,vcm-rated-current = <76>; rockchip,vcm-step-mode = <0>; rockchip,camera-module-index = <0>; rockchip,camera-module-facing = "back"; }; imx415b: imx415b@1a { compatible = "sony,imx415"; status = "disable"; reg = <0x1a>; clocks = <&cru CLK_MIPI_CAMARAOUT_M1>; clock-names = "xvclk"; power-domains = <&power RK3588_PD_VI>; pinctrl-names = "default", "camb_gpios"; pinctrl-0 = <&mipim1_camera1_clk>, <&camb_gpio>; rockchip,grf = <&sys_grf>; reset-gpios = <&gpio1 RK_PB2 GPIO_ACTIVE_LOW>; pwdn-gpios = <&gpio1 RK_PB3 GPIO_ACTIVE_HIGH>; rockchip,camera-module-index = <0>; rockchip,camera-module-facing = "back"; rockchip,camera-module-name = "CMK-OT2022-PX1"; rockchip,camera-module-lens-name = "IR0147-50IRC-8M-F20"; lens-focus = <&dw9714b>; port { imx415b_out0: endpoint { remote-endpoint = <&mipi_in_dcphy0>; data-lanes = <1 2 3 4>; }; }; }; mvcam: mvcam@3b{ compatible = "veye,mvcam"; status = "okay"; reg = <0x3b>; clocks = <&cru CLK_MIPI_CAMARAOUT_M1>; clock-names = "xvclk"; pinctrl-names = "default"; pinctrl-0 = <&mipim1_camera1_clk>; power-domains = <&power RK3588_PD_VI>; //power-gpios = <&gpio1 RK_PC4 GPIO_ACTIVE_LOW>; reset-gpios = <&gpio3 RK_PA6 GPIO_ACTIVE_HIGH>;//用原来的19和20引脚,SC132M似乎不需要考虑这两个引脚 pwdn-gpios = <&gpio1 RK_PB3 GPIO_ACTIVE_HIGH>; //avdd-supply = <&vcc_mipidcphy0>; //firefly,clkout-enabled-index = <0>; rockchip,camera-module-index = <0>; rockchip,camera-module-facing = "back"; rockchip,camera-module-name = "NC"; rockchip,camera-module-lens-name = "NC"; port { mvcam_out0: endpoint { remote-endpoint = <&mipi_in_dcphy0>; data-lanes = <1 2>; }; }; }; }; &i2c3 {//cam1 status = "okay"; pinctrl-names = "default"; pinctrl-0 = <&i2c3m0_xfer>; dw9714f: dw9714f@c { compatible = "dongwoon,dw9714"; status = "okay"; reg = <0x0c>; pinctrl-names = "focusf_gpios"; pinctrl-0 = <&focusf_gpio>; focus-gpios = <&gpio1 RK_PA1 GPIO_ACTIVE_HIGH>; rockchip,vcm-start-current = <20>; rockchip,vcm-rated-current = <76>; rockchip,vcm-step-mode = <0>; rockchip,camera-module-index = <1>; rockchip,camera-module-facing = "front"; }; imx415f: imx415f@1a { compatible = "sony,imx415"; status = "okay"; reg = <0x1a>; clocks = <&cru CLK_MIPI_CAMARAOUT_M2>; clock-names = "xvclk"; power-domains = <&power RK3588_PD_VI>; pinctrl-names = "default", "camf_gpios"; pinctrl-0 = <&mipim1_camera2_clk>, <&camf_gpio>; rockchip,grf = <&sys_grf>; reset-gpios = <&gpio3 RK_PC6 GPIO_ACTIVE_LOW>; pwdn-gpios = <&gpio3 RK_PC5 GPIO_ACTIVE_HIGH>; rockchip,camera-module-index = <1>; rockchip,camera-module-facing = "front"; rockchip,camera-module-name = "CMK-OT2022-PX1"; rockchip,camera-module-lens-name = "IR0147-50IRC-8M-F20"; lens-focus = <&dw9714f>; port { imx415f_out1: endpoint { remote-endpoint = <&mipi_in_dcphy1>; data-lanes = <1 2 3 4>; }; }; }; }; &i2c8 {//cam3 status = "okay"; pinctrl-names = "default"; pinctrl-0 = <&i2c8m2_xfer>; dw9714c: dw9714c@c { compatible = "dongwoon,dw9714"; status = "okay"; reg = <0x0c>; pinctrl-names = "focusc_gpios"; pinctrl-0 = <&focusc_gpio>; focus-gpios = <&gpio1 RK_PA6 GPIO_ACTIVE_HIGH>; rockchip,vcm-start-current = <20>; rockchip,vcm-rated-current = <76>; rockchip,vcm-step-mode = <0>; rockchip,camera-module-index = <0>; rockchip,camera-module-facing = "back"; }; imx415: imx415@1a { compatible = "sony,imx415"; reg = <0x1a>; clocks = <&cru CLK_MIPI_CAMARAOUT_M3>; clock-names = "xvclk"; pinctrl-names = "default", "camc_gpios"; pinctrl-0 = <&mipim1_camera3_clk>, <&camc_gpio>; power-domains = <&power RK3588_PD_VI>; reset-gpios = <&gpio3 RK_PB4 GPIO_ACTIVE_LOW>; pwdn-gpios = <&gpio1 RK_PA4 GPIO_ACTIVE_HIGH>; rockchip,camera-module-index = <0>; rockchip,camera-module-facing = "back"; rockchip,camera-module-name = "CMK-OT2022-PX1"; rockchip,camera-module-lens-name = "IR0147-50IRC-8M-F20"; lens-focus = <&dw9714c>; port { imx415c_out0: endpoint { remote-endpoint = <&mipidphy0_in_ucam0>; data-lanes = <1 2 3 4>; }; }; }; }; &pinctrl { cam { mipidphy0_pwr: mipidphy0-pwr { rockchip,pins = /* camera power en */ <1 RK_PB2 RK_FUNC_GPIO &pcfg_output_high>; }; camf_gpio: camf-gpio {//imx415 rockchip,pins = <3 RK_PC6 RK_FUNC_GPIO &pcfg_pull_none>, <3 RK_PC5 RK_FUNC_GPIO &pcfg_pull_none>; }; camb_gpio: camb-gpio {//imx415 rockchip,pins = <1 RK_PB2 RK_FUNC_GPIO &pcfg_pull_none>, <1 RK_PB3 RK_FUNC_GPIO &pcfg_pull_none>; }; camc_gpio: camc-gpio {//imx415 rockchip,pins = <3 RK_PB4 RK_FUNC_GPIO &pcfg_pull_none>, <1 RK_PA4 RK_FUNC_GPIO &pcfg_pull_none>; }; focusb_gpio: focusb-gpio {//dw9714 rockchip,pins = <1 RK_PA0 RK_FUNC_GPIO &pcfg_pull_none>; }; focusf_gpio: focusf-gpio {//dw9714 rockchip,pins = <1 RK_PA1 RK_FUNC_GPIO &pcfg_pull_none>; }; focusc_gpio: focusc-gpio {//dw9714 rockchip,pins = <1 RK_PA6 RK_FUNC_GPIO &pcfg_pull_none>; }; }; }; &mipi0_csi2 {//cam2 status = "okay"; ports { #address-cells = <1>; #size-cells = <0>; port@0 { reg = <0>; #address-cells = <1>; #size-cells = <0>; mipi0_csi2_input: endpoint@1 { reg = <1>; remote-endpoint = <&csidcphy0_out>; }; }; port@1 { reg = <1>; #address-cells = <1>; #size-cells = <0>; mipi0_csi2_output: endpoint@0 { reg = <0>; remote-endpoint = <&cif_mipi_in0>; }; }; }; }; &mipi1_csi2 {//cam1 status = "okay"; ports { #address-cells = <1>; #size-cells = <0>; port@0 { reg = <0>; #address-cells = <1>; #size-cells = <0>; mipi1_csi2_input: endpoint@1 { reg = <1>; remote-endpoint = <&csidcphy1_out>; }; }; port@1 { reg = <1>; #address-cells = <1>; #size-cells = <0>; mipi1_csi2_output: endpoint@0 { reg = <0>; remote-endpoint = <&cif_mipi_in1>; }; }; }; }; &mipi2_csi2 {//cam3 status = "okay"; ports { #address-cells = <1>; #size-cells = <0>; port@0 { reg = <0>; #address-cells = <1>; #size-cells = <0>; mipi2_csi2_input: endpoint@1 { reg = <1>; remote-endpoint = <&csidphy0_out>; }; }; port@1 { reg = <1>; #address-cells = <1>; #size-cells = <0>; mipi2_csi2_output: endpoint@0 { reg = <0>; remote-endpoint = <&cif_mipi2_in0>; }; }; }; }; &rkcif { status = "okay"; }; &rkcif_mipi_lvds { status = "okay"; port { cif_mipi_in0: endpoint { remote-endpoint = <&mipi0_csi2_output>; }; }; }; &rkcif_mipi_lvds_sditf { status = "okay"; port { mipi_lvds_sditf: endpoint { remote-endpoint = <&isp0_vir0>; }; }; }; &rkcif_mipi_lvds1 { status = "okay"; port { cif_mipi_in1: endpoint { remote-endpoint = <&mipi1_csi2_output>; }; }; }; &rkcif_mipi_lvds1_sditf { status = "okay"; port { mipi1_lvds_sditf: endpoint { remote-endpoint = <&isp0_vir1>; }; }; }; &rkcif_mipi_lvds2 { status = "okay"; port { cif_mipi2_in0: endpoint { remote-endpoint = <&mipi2_csi2_output>; }; }; }; &rkcif_mipi_lvds2_sditf { status = "okay"; port { mipi_lvds2_sditf: endpoint { remote-endpoint = <&isp1_vir0>; }; }; }; &rkcif_mmu { status = "okay"; }; &rkisp0 { status = "okay"; }; &isp0_mmu { status = "okay"; }; &rkisp0_vir0 { status = "okay"; port { #address-cells = <1>; #size-cells = <0>; isp0_vir0: endpoint@0 { reg = <0>; remote-endpoint = <&mipi_lvds_sditf>; }; }; }; &rkisp0_vir1 { status = "okay"; port { #address-cells = <1>; #size-cells = <0>; isp0_vir1: endpoint@0 { reg = <0>; remote-endpoint = <&mipi1_lvds_sditf>; }; }; }; &rkisp1 { status = "okay"; }; &isp1_mmu { status = "okay"; }; &rkisp1_vir0 { status = "okay"; port { #address-cells = <1>; #size-cells = <0>; isp1_vir0: endpoint@0 { reg = <0>; remote-endpoint = <&mipi_lvds2_sditf>; }; }; };开发板能够识别到相机:
[ 10.868932] mvcam 4-003b: veye mv series camera driver version: 01.01.04 [ 11.872574] mvcam 4-003b: camera is: RAW-MIPI-SC132M [ 11.873598] mvcam 4-003b: firmware version: 0x1040000 [ 11.877481] mvcam 4-003b: mvcam_get_mipifeature: lane num 2, datarate 1500000000 bps [ 11.877588] mvcam 4-003b: Success to get mvcam endpoint data lanes, dts uses 2 lanes [ 11.891182] mvcam 4-003b: mvcam_enum_controls success但是使用命令
v4l2-ctl -d /dev/video0 --set-fmt-video=width=1080,height=1280,pixelformat=GREY --stream-mmap --stream-count=1 --stream-to=y8-1088x1280.raw会报错:
[ 2912.107051] rkcif-mipi-lvds: ERROR: csi size err, intstat:0x1000000, lastline:0!!之后我通过v4l2-ctl -L命令发现:
[ 3120.790050] rockchip-csi2-dphy csi2-dcphy0: csi2_dphy_update_sensor_mbus fail to get dphy param, used default value我不知道哪里出现了问题,请问我该如何排查?
-
RE: 有关veye_mvcam驱动编译的问题posted in Rockchip App camera
@veye_xumm 11号引脚power enable需要多少V?我将该引脚拉高,电压表测量结果为1.8V,log显示没有检测到相机。我也检测了电源引脚,为3.3V,没有问题。
-
RE: 有关veye_mvcam驱动编译的问题posted in Rockchip App camera
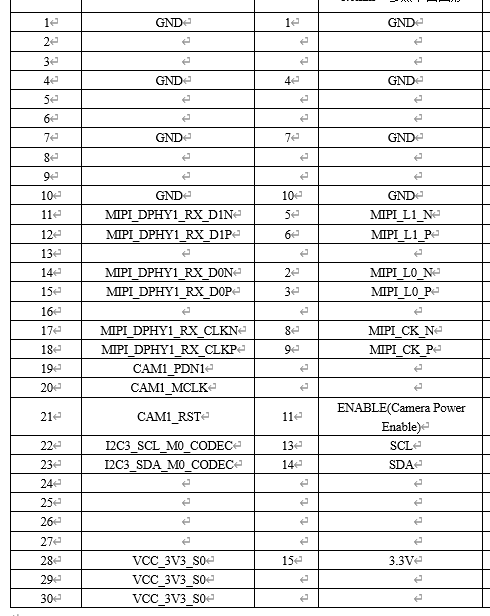
@veye_xumm 您好,我注释掉了有关RKMODULE_GET_CSI_DSI_INFO的case,编译通过了,我连接好相机后却没能识别到相机。我使用的是i2c-3和i2c-4。
[ 10.906532] mvcam 3-003b: veye mv series camera driver version: 01.01.04 [ 11.909428] mvcam: mvcam_read: Reading register 0x04 failed [ 11.909481] mvcam 3-003b: failed to read chip id [ 11.909905] mvcam 4-003b: veye mv series camera driver version: 01.01.04 [ 12.912928] mvcam: mvcam_read: Reading register 0x04 failed [ 12.913033] mvcam 4-003b: failed to read chip id我觉得我的硬件连线没有问题,与电路原理图一一对应,通过定制的软线排连接。图像传感器也没有发热。我希望先排查软件方面的问题,但是我不知道该从何处开始排查起,或者有哪些可以使用的工具。图片里左侧为开发板相机接口线序,右侧为SC132M接口线序。
设备树相关代码:&csi2_dcphy0 { status = "okay"; ports { #address-cells = <1>; #size-cells = <0>; port@0 { reg = <0>; #address-cells = <1>; #size-cells = <0>; mipi_in_dcphy0: endpoint@1 { reg = <1>; remote-endpoint = <&mvcamb_out0>; data-lanes = <1 2>; }; }; port@1 { reg = <1>; #address-cells = <1>; #size-cells = <0>; csidcphy0_out: endpoint@0 { reg = <0>; remote-endpoint = <&mipi0_csi2_input>; }; }; }; }; &mipi_dcphy0 { status = "okay"; }; &csi2_dcphy1 { status = "okay"; ports { #address-cells = <1>; #size-cells = <0>; port@0 { reg = <0>; #address-cells = <1>; #size-cells = <0>; mipi_in_dcphy1: endpoint@1 { reg = <1>; remote-endpoint = <&mvcamf_out1>; data-lanes = <1 2>; }; }; port@1 { reg = <1>; #address-cells = <1>; #size-cells = <0>; csidcphy1_out: endpoint@0 { reg = <0>; remote-endpoint = <&mipi1_csi2_input>; }; }; }; }; &mipi_dcphy1 { status = "okay"; }; &csi2_dphy0 { status = "okay"; ports { #address-cells = <1>; #size-cells = <0>; port@0 { reg = <0>; #address-cells = <1>; #size-cells = <0>; mipidphy0_in_ucam0: endpoint@1 { reg = <1>; remote-endpoint = <&imx415c_out0>; data-lanes = <1 2 3 4>; }; }; port@1 { reg = <1>; #address-cells = <1>; #size-cells = <0>; csidphy0_out: endpoint@0 { reg = <0>; remote-endpoint = <&mipi2_csi2_input>; }; }; }; }; &csi2_dphy0_hw { status = "okay"; }; &i2c4 { status = "okay"; pinctrl-names = "default"; pinctrl-0 = <&i2c4m3_xfer>; dw9714b: dw9714b@c { compatible = "dongwoon,dw9714"; status = "okay"; reg = <0x0c>; pinctrl-names = "focusb_gpios"; pinctrl-0 = <&focusb_gpio>; focus-gpios = <&gpio1 RK_PA0 GPIO_ACTIVE_HIGH>; rockchip,vcm-start-current = <20>; rockchip,vcm-rated-current = <76>; rockchip,vcm-step-mode = <0>; rockchip,camera-module-index = <0>; rockchip,camera-module-facing = "back"; }; imx415b: imx415b@1a { compatible = "sony,imx415"; status = "okay"; reg = <0x1a>; clocks = <&cru CLK_MIPI_CAMARAOUT_M1>; clock-names = "xvclk"; power-domains = <&power RK3588_PD_VI>; pinctrl-names = "default", "camb_gpios"; pinctrl-0 = <&mipim1_camera1_clk>, <&camb_gpio>; rockchip,grf = <&sys_grf>; reset-gpios = <&gpio1 RK_PB2 GPIO_ACTIVE_LOW>; pwdn-gpios = <&gpio1 RK_PB3 GPIO_ACTIVE_HIGH>; rockchip,camera-module-index = <0>; rockchip,camera-module-facing = "back"; rockchip,camera-module-name = "CMK-OT2022-PX1"; rockchip,camera-module-lens-name = "IR0147-50IRC-8M-F20"; lens-focus = <&dw9714b>; port { imx415b_out0: endpoint { remote-endpoint = <&mipi_in_dcphy0>; data-lanes = <1 2 3 4>; }; }; }; mvcamb: mvcamb@3b{ compatible = "veye,mvcam"; reg = <0x3b>; clocks = <&cru CLK_MIPI_CAMARAOUT_M1>; clock-names = "xvclk"; pinctrl-names = "default"; pinctrl-0 = <&mipim1_camera1_clk>; power-domains = <&power RK3588_PD_VI>; //power-gpios = <&gpio4 RK_PB5 GPIO_ACTIVE_LOW>; reset-gpios = <&gpio1 RK_PB2 GPIO_ACTIVE_HIGH>;//&gpio3 RK_PC4 GPIO_ACTIVE_HIGH pwdn-gpios = <&gpio1 RK_PB3 GPIO_ACTIVE_HIGH>;//&gpio3 RK_PC1 GPIO_ACTIVE_HIGH //avdd-supply = <&vcc_mipidcphy0>; //firefly,clkout-enabled-index = <0>; rockchip,camera-module-index = <0>; rockchip,camera-module-facing = "back"; rockchip,camera-module-name = "NC"; rockchip,camera-module-lens-name = "NC"; port { mvcamb_out0: endpoint { remote-endpoint = <&mipi_in_dcphy0>;//&mipidphy0_in_ucam0 data-lanes = <1 2>; }; }; }; }; &i2c3 { status = "okay"; pinctrl-names = "default"; pinctrl-0 = <&i2c3m0_xfer>; dw9714f: dw9714f@c { compatible = "dongwoon,dw9714"; status = "okay"; reg = <0x0c>; pinctrl-names = "focusf_gpios"; pinctrl-0 = <&focusf_gpio>; focus-gpios = <&gpio1 RK_PA1 GPIO_ACTIVE_HIGH>; rockchip,vcm-start-current = <20>; rockchip,vcm-rated-current = <76>; rockchip,vcm-step-mode = <0>; rockchip,camera-module-index = <1>; rockchip,camera-module-facing = "front"; }; imx415f: imx415f@1a { compatible = "sony,imx415"; status = "okay"; reg = <0x1a>; clocks = <&cru CLK_MIPI_CAMARAOUT_M2>; clock-names = "xvclk"; power-domains = <&power RK3588_PD_VI>; pinctrl-names = "default", "camf_gpios"; pinctrl-0 = <&mipim1_camera2_clk>, <&camf_gpio>; rockchip,grf = <&sys_grf>; reset-gpios = <&gpio3 RK_PC6 GPIO_ACTIVE_LOW>; pwdn-gpios = <&gpio3 RK_PC5 GPIO_ACTIVE_HIGH>; rockchip,camera-module-index = <1>; rockchip,camera-module-facing = "front"; rockchip,camera-module-name = "CMK-OT2022-PX1"; rockchip,camera-module-lens-name = "IR0147-50IRC-8M-F20"; lens-focus = <&dw9714f>; port { imx415f_out1: endpoint { remote-endpoint = <&mipi_in_dcphy1>; data-lanes = <1 2 3 4>; }; }; }; mvcamf: mvcamf@3b{ compatible = "veye,mvcam"; reg = <0x3b>; clocks = <&cru CLK_MIPI_CAMARAOUT_M2>; clock-names = "xvclk"; pinctrl-names = "default"; pinctrl-0 = <&mipim1_camera2_clk>; power-domains = <&power RK3588_PD_VI>; //power-gpios = <&gpio4 RK_PB5 GPIO_ACTIVE_LOW>; reset-gpios = <&gpio3 RK_PC6 GPIO_ACTIVE_HIGH>;//&gpio3 RK_PC4 GPIO_ACTIVE_HIGH pwdn-gpios = <&gpio3 RK_PC5 GPIO_ACTIVE_HIGH>;//&gpio3 RK_PC1 GPIO_ACTIVE_HIGH //avdd-supply = <&vcc_mipidcphy0>; //firefly,clkout-enabled-index = <0>; rockchip,camera-module-index = <1>; rockchip,camera-module-facing = "back"; rockchip,camera-module-name = "NC"; rockchip,camera-module-lens-name = "NC"; port { mvcamf_out1: endpoint { remote-endpoint = <&mipi_in_dcphy1>;//&mipidphy0_in_ucam0 data-lanes = <1 2>; }; }; }; }; &i2c8 { status = "okay"; pinctrl-names = "default"; pinctrl-0 = <&i2c8m2_xfer>; dw9714c: dw9714c@c { compatible = "dongwoon,dw9714"; status = "okay"; reg = <0x0c>; pinctrl-names = "focusc_gpios"; pinctrl-0 = <&focusc_gpio>; focus-gpios = <&gpio1 RK_PA6 GPIO_ACTIVE_HIGH>; rockchip,vcm-start-current = <20>; rockchip,vcm-rated-current = <76>; rockchip,vcm-step-mode = <0>; rockchip,camera-module-index = <0>; rockchip,camera-module-facing = "back"; }; imx415: imx415@1a { compatible = "sony,imx415"; reg = <0x1a>; clocks = <&cru CLK_MIPI_CAMARAOUT_M3>; clock-names = "xvclk"; pinctrl-names = "default", "camc_gpios"; pinctrl-0 = <&mipim1_camera3_clk>, <&camc_gpio>; power-domains = <&power RK3588_PD_VI>; reset-gpios = <&gpio3 RK_PB4 GPIO_ACTIVE_LOW>; pwdn-gpios = <&gpio1 RK_PA4 GPIO_ACTIVE_HIGH>; rockchip,camera-module-index = <0>; rockchip,camera-module-facing = "back"; rockchip,camera-module-name = "CMK-OT2022-PX1"; rockchip,camera-module-lens-name = "IR0147-50IRC-8M-F20"; lens-focus = <&dw9714c>; port { imx415c_out0: endpoint { remote-endpoint = <&mipidphy0_in_ucam0>; data-lanes = <1 2 3 4>; }; }; }; }; &pinctrl { cam { camf_gpio: camf-gpio { rockchip,pins = <3 RK_PC6 RK_FUNC_GPIO &pcfg_pull_none>, <3 RK_PC5 RK_FUNC_GPIO &pcfg_pull_none>; }; camb_gpio: camb-gpio { rockchip,pins = <1 RK_PB2 RK_FUNC_GPIO &pcfg_pull_none>, <1 RK_PB3 RK_FUNC_GPIO &pcfg_pull_none>; }; camc_gpio: camc-gpio { rockchip,pins = <3 RK_PB4 RK_FUNC_GPIO &pcfg_pull_none>, <1 RK_PA4 RK_FUNC_GPIO &pcfg_pull_none>; }; focusb_gpio: focusb-gpio { rockchip,pins = <1 RK_PA0 RK_FUNC_GPIO &pcfg_pull_none>; }; focusf_gpio: focusf-gpio { rockchip,pins = <1 RK_PA1 RK_FUNC_GPIO &pcfg_pull_none>; }; focusc_gpio: focusc-gpio { rockchip,pins = <1 RK_PA6 RK_FUNC_GPIO &pcfg_pull_none>; }; }; }; &mipi0_csi2 { status = "okay"; ports { #address-cells = <1>; #size-cells = <0>; port@0 { reg = <0>; #address-cells = <1>; #size-cells = <0>; mipi0_csi2_input: endpoint@1 { reg = <1>; remote-endpoint = <&csidcphy0_out>; }; }; port@1 { reg = <1>; #address-cells = <1>; #size-cells = <0>; mipi0_csi2_output: endpoint@0 { reg = <0>; remote-endpoint = <&cif_mipi_in0>; }; }; }; }; &mipi1_csi2 { status = "okay"; ports { #address-cells = <1>; #size-cells = <0>; port@0 { reg = <0>; #address-cells = <1>; #size-cells = <0>; mipi1_csi2_input: endpoint@1 { reg = <1>; remote-endpoint = <&csidcphy1_out>; }; }; port@1 { reg = <1>; #address-cells = <1>; #size-cells = <0>; mipi1_csi2_output: endpoint@0 { reg = <0>; remote-endpoint = <&cif_mipi_in1>; }; }; }; }; &mipi2_csi2 { status = "okay"; ports { #address-cells = <1>; #size-cells = <0>; port@0 { reg = <0>; #address-cells = <1>; #size-cells = <0>; mipi2_csi2_input: endpoint@1 { reg = <1>; remote-endpoint = <&csidphy0_out>; }; }; port@1 { reg = <1>; #address-cells = <1>; #size-cells = <0>; mipi2_csi2_output: endpoint@0 { reg = <0>; remote-endpoint = <&cif_mipi2_in0>; }; }; }; }; &rkcif { status = "okay"; }; &rkcif_mipi_lvds { status = "okay"; port { cif_mipi_in0: endpoint { remote-endpoint = <&mipi0_csi2_output>; }; }; }; &rkcif_mipi_lvds_sditf { status = "okay"; port { mipi_lvds_sditf: endpoint { remote-endpoint = <&isp0_vir0>; }; }; }; &rkcif_mipi_lvds1 { status = "okay"; port { cif_mipi_in1: endpoint { remote-endpoint = <&mipi1_csi2_output>; }; }; }; &rkcif_mipi_lvds1_sditf { status = "okay"; port { mipi1_lvds_sditf: endpoint { remote-endpoint = <&isp0_vir1>; }; }; }; &rkcif_mipi_lvds2 { status = "okay"; port { cif_mipi2_in0: endpoint { remote-endpoint = <&mipi2_csi2_output>; }; }; }; &rkcif_mipi_lvds2_sditf { status = "okay"; port { mipi_lvds2_sditf: endpoint { remote-endpoint = <&isp1_vir0>; }; }; }; &rkcif_mmu { status = "okay"; }; &rkisp0 { status = "okay"; }; &isp0_mmu { status = "okay"; }; &rkisp0_vir0 { status = "okay"; port { #address-cells = <1>; #size-cells = <0>; isp0_vir0: endpoint@0 { reg = <0>; remote-endpoint = <&mipi_lvds_sditf>; }; }; }; &rkisp0_vir1 { status = "okay"; port { #address-cells = <1>; #size-cells = <0>; isp0_vir1: endpoint@0 { reg = <0>; remote-endpoint = <&mipi1_lvds_sditf>; }; }; }; &rkisp1 { status = "okay"; }; &isp1_mmu { status = "okay"; }; &rkisp1_vir0 { status = "okay"; port { #address-cells = <1>; #size-cells = <0>; isp1_vir0: endpoint@0 { reg = <0>; remote-endpoint = <&mipi_lvds2_sditf>; }; }; }; -
有关veye_mvcam驱动编译的问题posted in Rockchip App camera
我想在RK3588s (khadas的edge2开发板)上使用RAW MIPI SC132M,按照步骤修改了设备树文件,将veye_mvcam.c和veye_cam.h文件放到了对应的路径下,在编译过程中报错了,log如下。
make[1]: Entering directory '/home/pyg/project/khadas/fenix/build/linux' SYNC include/config/auto.conf.cmd CALL scripts/atomic/check-atomics.sh CALL scripts/checksyscalls.sh GEN usr/initramfs_data.cpio SHIPPED usr/initramfs_inc_data AS usr/initramfs_data.o AR usr/built-in.a CHK include/generated/compile.h UPD include/generated/compile.h CC init/version.o AR init/built-in.a UPD kernel/config_data GZIP kernel/config_data.gz CC kernel/configs.o AR kernel/built-in.a CC drivers/media/i2c/veye_mvcam.o drivers/media/i2c/veye_mvcam.c: In function 'mvcam_ioctl': drivers/media/i2c/veye_mvcam.c:859:10: error: 'RKMODULE_GET_CSI_DSI_INFO' undeclared (first use in this function); did you mean 'RKMODULE_GET_CHANNEL_INFO'? 859 | case RKMODULE_GET_CSI_DSI_INFO: | ^~~~~~~~~~~~~~~~~~~~~~~~~ | RKMODULE_GET_CHANNEL_INFO drivers/media/i2c/veye_mvcam.c:859:10: note: each undeclared identifier is reported only once for each function it appears in drivers/media/i2c/veye_mvcam.c:860:17: error: 'RKMODULE_CSI_INPUT' undeclared (first use in this function) 860 | *(int *)arg = RKMODULE_CSI_INPUT; | ^~~~~~~~~~~~~~~~~~ drivers/media/i2c/veye_mvcam.c: In function 'mvcam_compat_ioctl32': drivers/media/i2c/veye_mvcam.c:918:10: error: 'RKMODULE_GET_CSI_DSI_INFO' undeclared (first use in this function); did you mean 'RKMODULE_GET_CHANNEL_INFO'? 918 | case RKMODULE_GET_CSI_DSI_INFO: | ^~~~~~~~~~~~~~~~~~~~~~~~~ | RKMODULE_GET_CHANNEL_INFO drivers/media/i2c/veye_mvcam.c:919:17: error: 'RKMODULE_CSI_INPUT' undeclared (first use in this function) 919 | *(int *)arg = RKMODULE_CSI_INPUT; | ^~~~~~~~~~~~~~~~~~ make[4]: *** [scripts/Makefile.build:273: drivers/media/i2c/veye_mvcam.o] Error 1 make[3]: *** [scripts/Makefile.build:516: drivers/media/i2c] Error 2 make[3]: *** Waiting for unfinished jobs.... make[2]: *** [scripts/Makefile.build:516: drivers/media] Error 2 make[2]: *** Waiting for unfinished jobs.... make[1]: *** [Makefile:1917: drivers] Error 2 make[1]: Leaving directory '/home/pyg/project/khadas/fenix/build/linux'请问怎么才能让veye_mvcam.o编译通过,谢谢。