If you applied a batch using "Jetson NX Jetpack 4.6.1", were you able to successfully connect 4 cameras?
O
Offline
Latest posts made by octa_yk
-
RE: Error occurs when more than three CS-USB-IMX307 are connected.
-
RE: Error occurs when more than three CS-USB-IMX307 are connected.
You do not need to use gstreamer.
So how can I connect and display four cameras?
Please direct me to the answer from among all the possibilities.Or are you stating that you can for a phenomenon that has never been realized?
-
RE: Error occurs when more than three CS-USB-IMX307 are connected.
I don't have much experience with this either.
In other words, I have never connected this camera to NX to display four cameras. There is no guarantee that I can. Is that correct?
Also, you can go to nvidia's forum to ask this question. They should have more experience.
There has been some discussion about this on the nvidia forums, but nvidia has stated that it is possible to connect 4 cameras.
If you can't connect them, then the problem is with the camera itself.
In other words, the camera is reserving more bandwidth than it needs, and if the total amount exceeds the limit, an error will occur. -
RE: Error occurs when more than three CS-USB-IMX307 are connected.
I used "nvoverlaysink" and the result was the same.
Are you able to connect and image 4 USB cameras in your environment?
Please let us know the details of your environment, including the OS version you are using.
$ gst-launch-1.0 v4l2src device=/dev/video0 ! 'video/x-raw,format=YUY2,width=640,height=360,framerate=30/1' ! nvvidconv ! 'video/x-raw(memory:NVMM),format=NV12' ! nvvidconv ! nvoverlaysink & \ > gst-launch-1.0 v4l2src device=/dev/video1 ! 'video/x-raw,format=YUY2,width=640,height=360,framerate=30/1' ! nvvidconv ! 'video/x-raw(memory:NVMM),format=NV12' ! nvvidconv ! nvoverlaysink & \ > gst-launch-1.0 v4l2src device=/dev/video2 ! 'video/x-raw,format=YUY2,width=640,height=360,framerate=30/1' ! nvvidconv ! 'video/x-raw(memory:NVMM),format=NV12' ! nvvidconv ! nvoverlaysink & [1] 9800 [2] 9801 [3] 9802 Setting pipeline to PAUSED ... Setting pipeline to PAUSED ... Setting pipeline to PAUSED ... Pipeline is live and does not need PREROLL ... Pipeline is live and does not need PREROLL ... Pipeline is live and does not need PREROLL ... Setting pipeline to PLAYING ... New clock: GstSystemClock Setting pipeline to PLAYING ... Setting pipeline to PLAYING ... New clock: GstSystemClock New clock: GstSystemClock ERROR: from element /GstPipeline:pipeline0/GstV4l2Src:v4l2src0: Failed to allocate required memory. Additional debug info: gstv4l2src.c(658): gst_v4l2src_decide_allocation (): /GstPipeline:pipeline0/GstV4l2Src:v4l2src0: Buffer pool activation failed Execution ended after 0:00:00.467221630 Setting pipeline to PAUSED ... Setting pipeline to READY ... Setting pipeline to NULL ... Freeing pipeline ... -
Error occurs when more than three CS-USB-IMX307 are connected.
I want to connect four CS-USB-IMX307 units to Jetson NX.
However, when I open the third unit, I get an error message.
Have you ever connected four CS-USB-IMX307 units to Jetson NX?
If you know how to connect them, please let me know.
$ gst-launch-1.0 v4l2src device=/dev/video0 ! 'video/x-raw,format=YUY2,width=640,height=360,framerate=30/1' ! nvvidconv ! 'video/x-raw(memory:NVMM),format=NV12' ! nvvidconv ! nveglglessink & \ > gst-launch-1.0 v4l2src device=/dev/video1 ! 'video/x-raw,format=YUY2,width=640,height=360,framerate=30/1' ! nvvidconv ! 'video/x-raw(memory:NVMM),format=NV12' ! nvvidconv ! nveglglessink & \ > gst-launch-1.0 v4l2src device=/dev/video2 ! 'video/x-raw,format=YUY2,width=640,height=360,framerate=30/1' ! nvvidconv ! 'video/x-raw(memory:NVMM),format=NV12' ! nvvidconv ! nveglglessink & [1] 10085 [2] 10086 [3] 10087 $ Setting pipeline to PAUSED ... Using winsys: x11 Pipeline is live and does not need PREROLL ... Got context from element 'eglglessink0': gst.egl.EGLDisplay=context, display=(GstEGLDisplay)NULL; Setting pipeline to PLAYING ... New clock: GstSystemClock Setting pipeline to PAUSED ... Using winsys: x11 Pipeline is live and does not need PREROLL ... Setting pipeline to PAUSED ... Using winsys: x11 Got context from element 'eglglessink0': gst.egl.EGLDisplay=context, display=(GstEGLDisplay)NULL; Setting pipeline to PLAYING ... New clock: GstSystemClock Pipeline is live and does not need PREROLL ... Got context from element 'eglglessink0': gst.egl.EGLDisplay=context, display=(GstEGLDisplay)NULL; Setting pipeline to PLAYING ... New clock: GstSystemClock ERROR: from element /GstPipeline:pipeline0/GstV4l2Src:v4l2src0: Failed to allocate required memory. Additional debug info: gstv4l2src.c(658): gst_v4l2src_decide_allocation (): /GstPipeline:pipeline0/GstV4l2Src:v4l2src0: Buffer pool activation failed Execution ended after 0:00:00.369937048 Setting pipeline to PAUSED ... Setting pipeline to READY ... Setting pipeline to NULL ... Freeing pipeline ... -
RE: I want to synchronize the two cameras in sync mode.
I understood that the synchronization signal is very accurate in an environment close to hardware.
We will check the details from time to time.
-
RE: I want to synchronize the two cameras in sync mode.
Thank you very much.
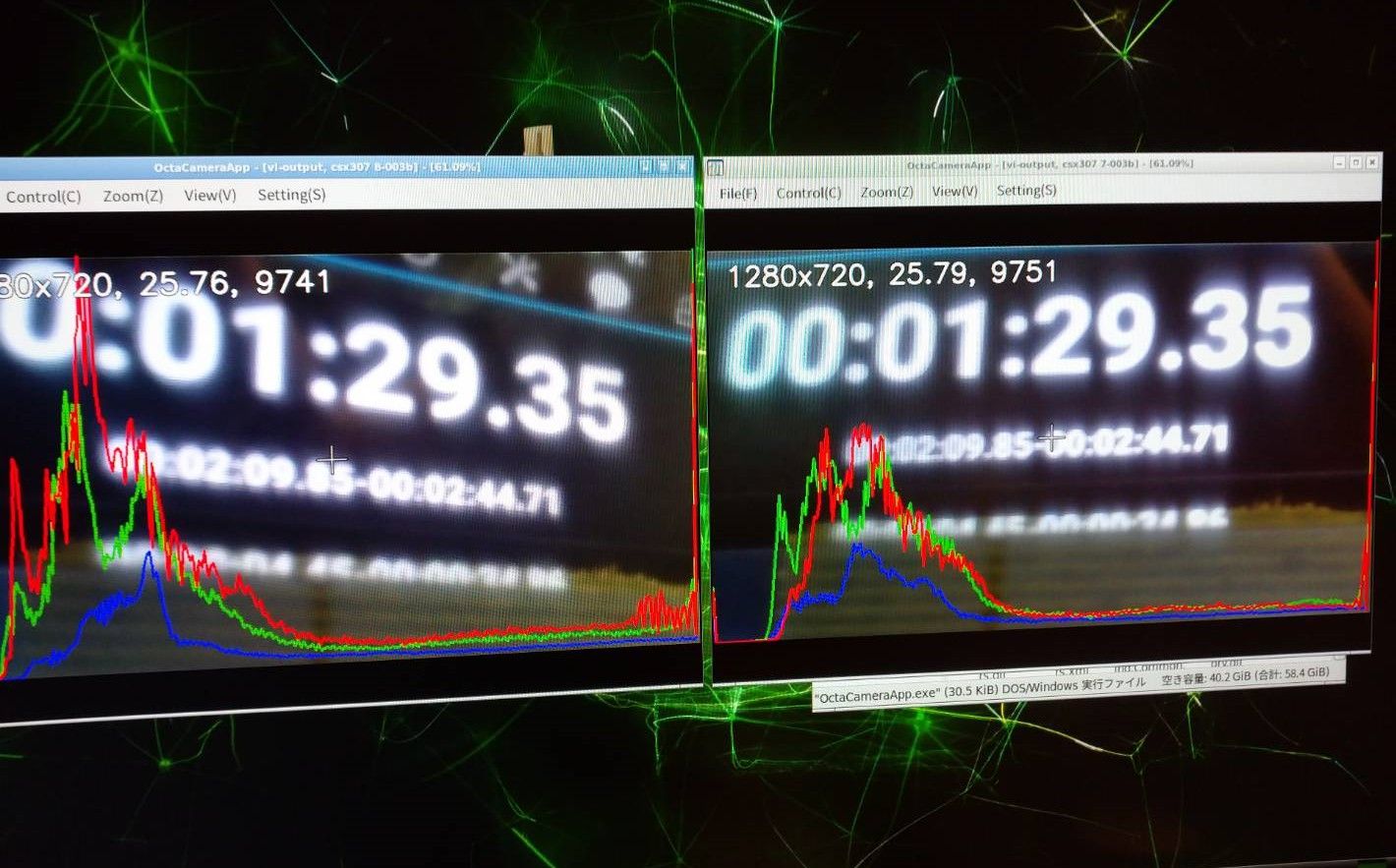
I fixed the wiring and was able to import the video successfully.Please tell me one point.
I know that the synchronized images do not have exactly the same timing, but how many milliseconds is the accuracy of the synchronization?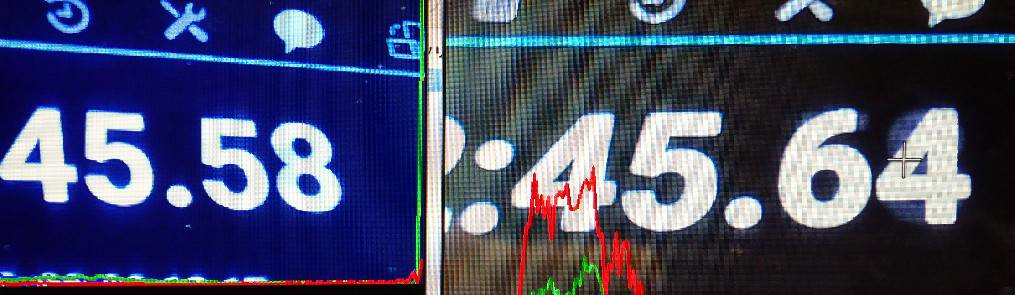
-
RE: I want to synchronize the two cameras in sync mode.
I upgraded the version using the following file, but I still get the same blue image.
https://www.mediafire.com/file/ellhe2jtv32bh1o/CS-MIPI-IMX307_FV2.36_LV3.3_20210303.bin/file
Is there any other place to check?
$ sudo ./veye_mipi_i2c.sh -r -f hdver -b 7 ====I2C write:<0x3b> <0x7> <0xfe>==== hardware version is 0x 2 $ ./cs_mipi_i2c.sh -r -f firmwarever -b 7 r firmware version is 2.36 $ sudo ./veye_mipi_i2c.sh -r -f hdver -b 8 ====I2C write:<0x3b> <0x7> <0xfe>==== hardware version is 0x 2 $ ./cs_mipi_i2c.sh -r -f firmwarever -b 8 r firmware version is 2.36 -
RE: I want to synchronize the two cameras in sync mode.
- Camera firmware version
$ sudo ./veye_mipi_i2c.sh -r -f hdver ====I2C write:<0x3b> <0x7> <0xfe>==== hardware version is 0x 2 $ ./cs_mipi_i2c.sh -r -f firmwarever r firmware version is 2.27- Wiring (J1-J7)

Is it likely that updating the firmware on the camera will fix the problem?
-
I want to synchronize the two cameras in sync mode.
Hi,
I want to synchronize the two cameras in sync mode.
However, I don't think the sync signal is being sent correctly.
Please let me know what I am doing wrong.- It works fine before the synchronization setting.
- The slave side captures a blue image when the synchronization is set as follows.
# 配置cam0为主 ./fpdlink3_i2c_jetson.sh -f sync_init -p 0 -p1 0 -b 7 ./cs_mipi_i2c.sh -w -f streammode -p1 1 -p2 0 -b 7 -d 0x3b # 配置cam1为从 ./fpdlink3_i2c_jetson.sh -f sync_init -p 0 -p1 1 -b 8 ./cs_mipi_i2c.sh -w -f streammode -p1 1 -p2 1 -b 8 -d 0x3b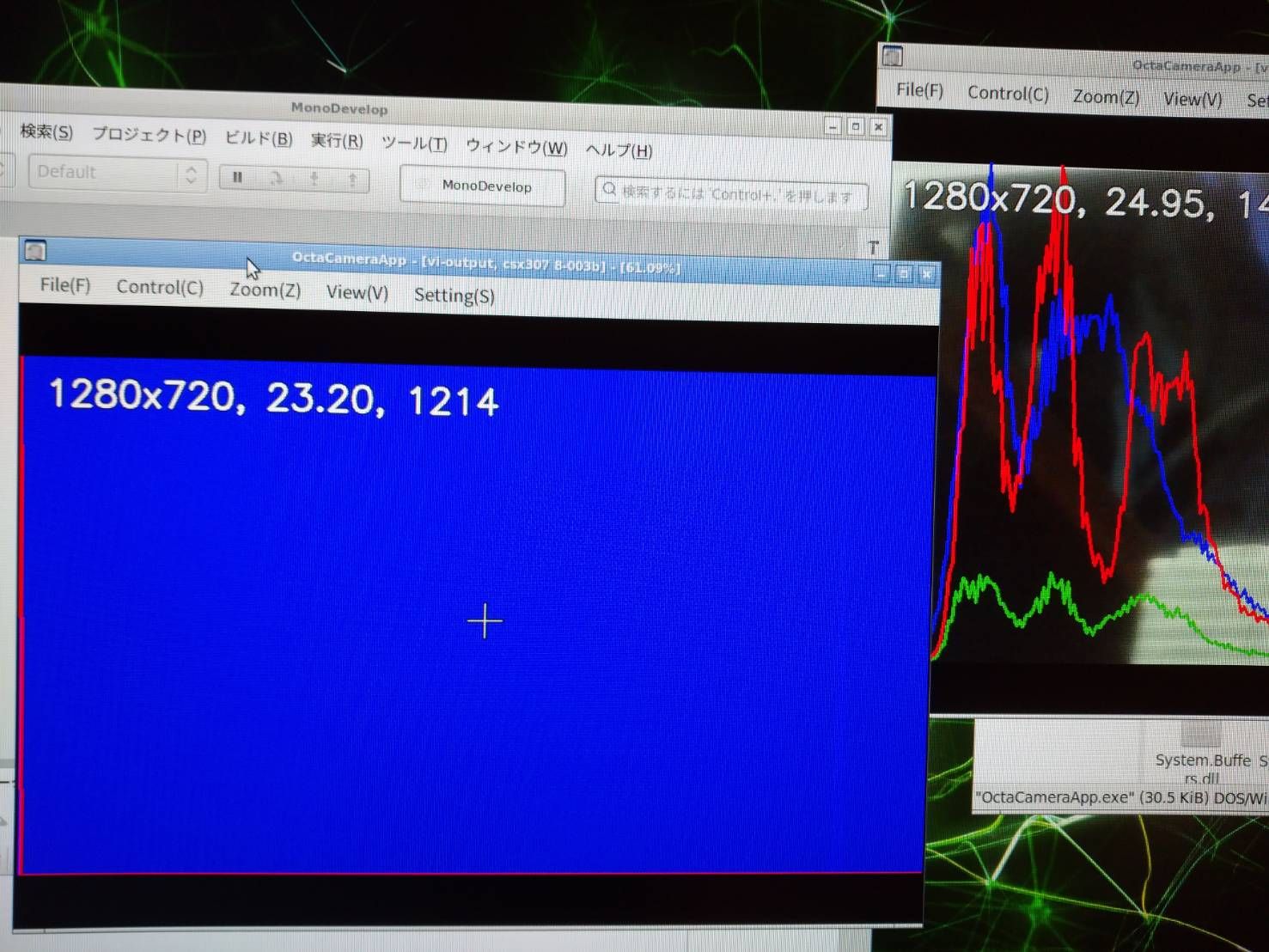
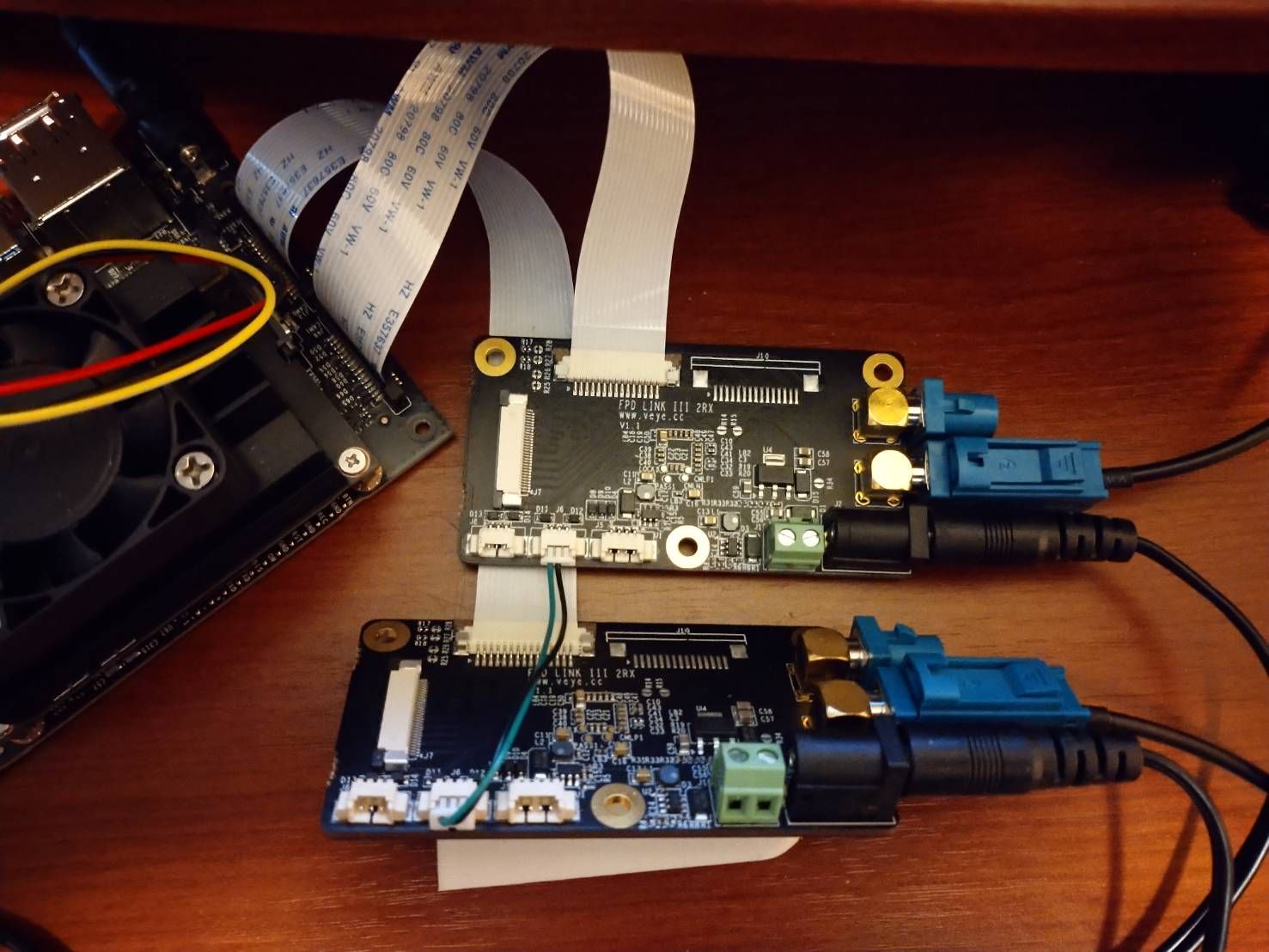
- The wiring is as follows.
Environment:
JetPack 4.4.1
Jetson Nano B01
CS-MIPI-IMX307-fpdlink