orin nano4g板卡使用MV-MIPI-IMX264M的问题
-
@veye_xumm 我这边没有您说的大于号和帧率,没有任何显示
-
@lakers
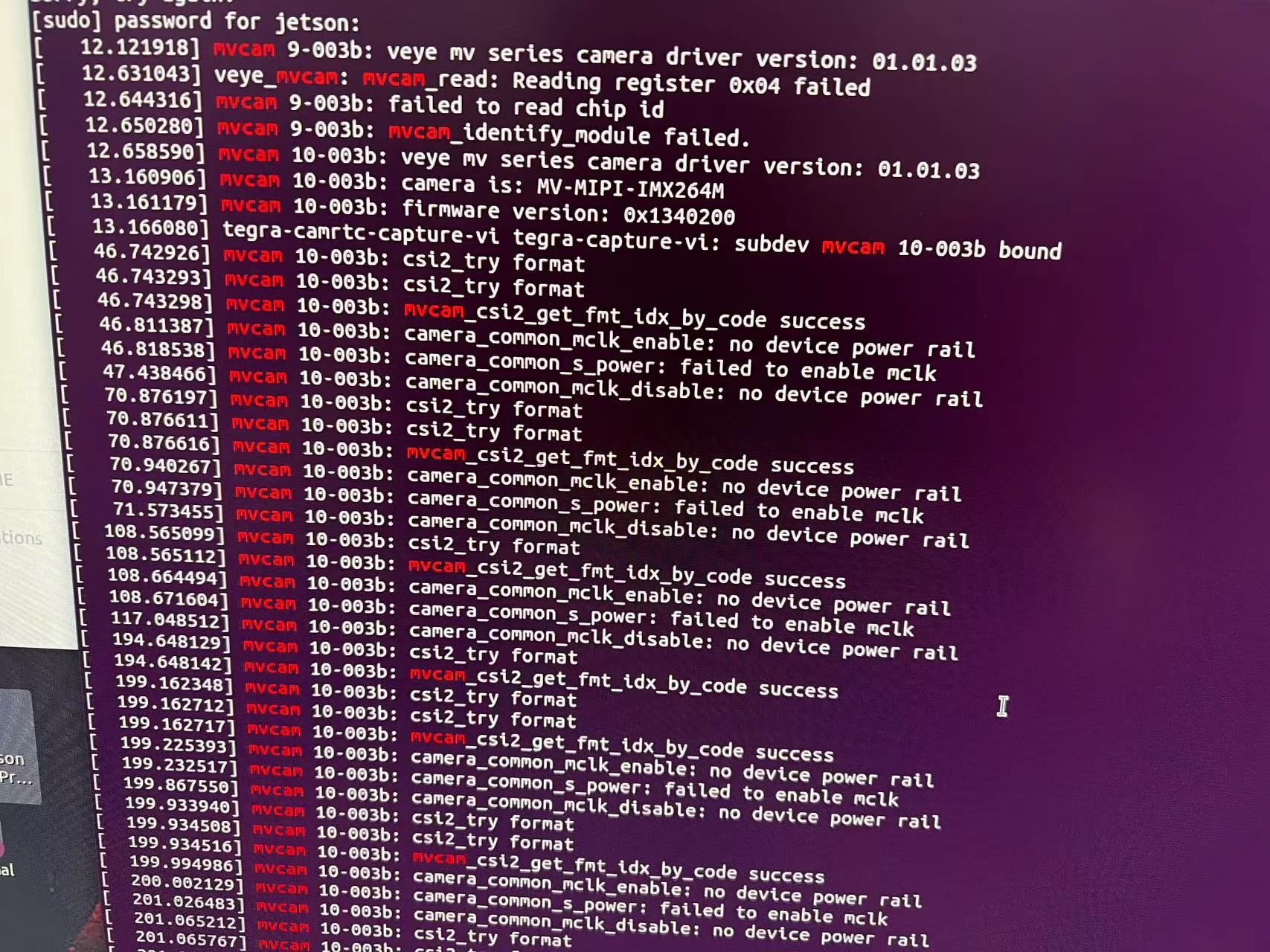
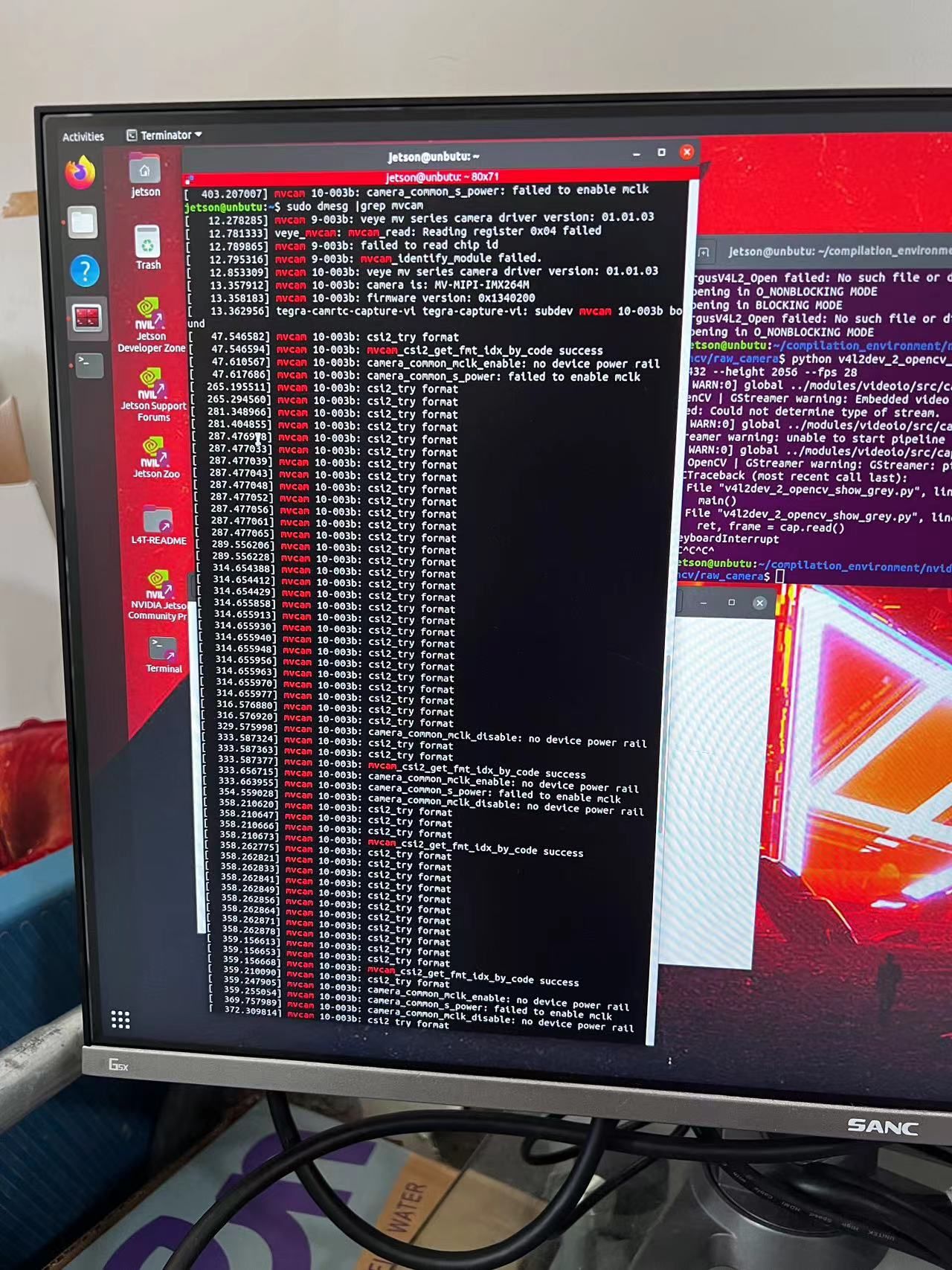
那不对。你现在执行一下dmesg,看一下驱动层的输出。 -
-
@lakers 没看到报错啊。你有没有配置触发模式之类的东西?
-
@veye_xumm 我之前配置了软触发和流模式
-
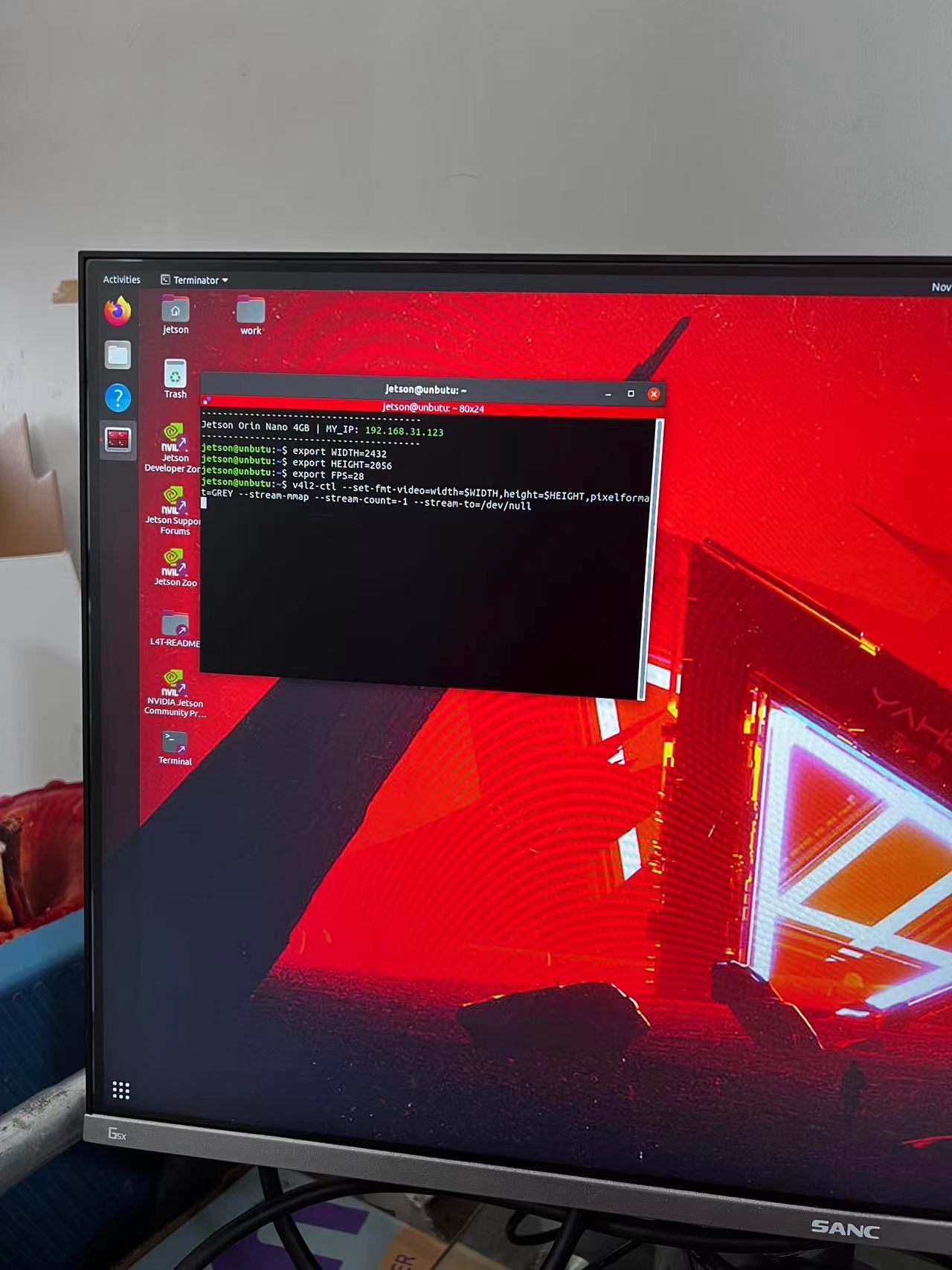
@lakers 你现在用脚本读取一下是不是流模式? 如果不是流模式,配置回流模式,再尝试测试。
-
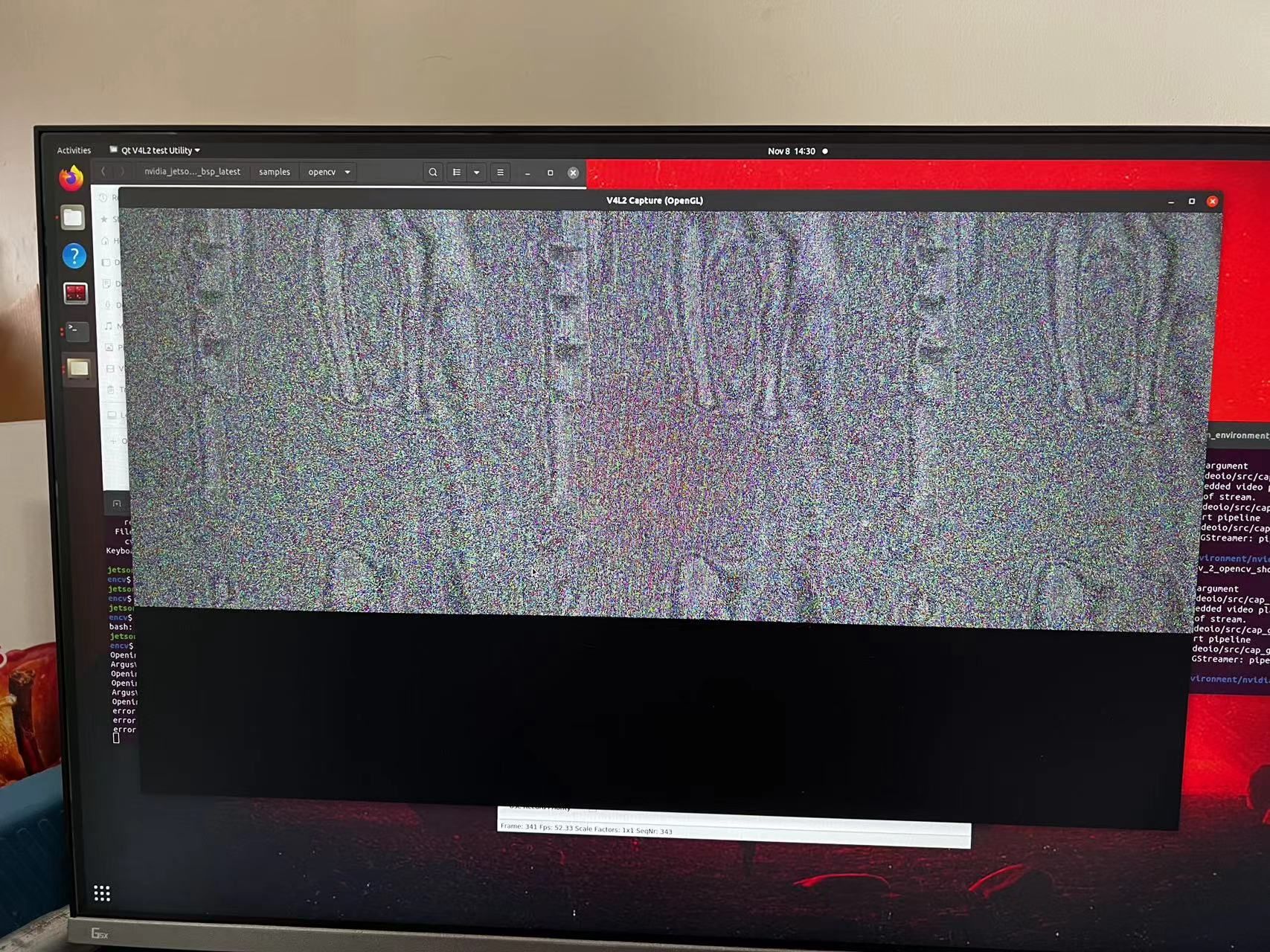
@veye_xumm 还有一个就是RAW-MIPI-IMX462M摄像头我用qv4l2能读取画面但是,显示是这个样子
-
@veye_xumm 请问一下这个怎么查流模式呢?您这个回流模式怎么配置呢?
-
@lakers said in orin nano4g板卡使用MV-MIPI-IMX264M的问题:
还有一个就是RAW-MIPI-IMX462M摄像头我用qv4l2能读取画面但是,显示是这个样子
IMX462不支持raw8,所以无法用qv4l2直接显示预览。你需要抓图之后用专门的yuv播放器进行图像显示。
@lakers said in orin nano4g板卡使用MV-MIPI-IMX264M的问题:
请问一下这个怎么查流模式呢?您这个回流模式怎么配置呢?
不是【回流】模式,而是配置回去到流模式。 你之前不是配置过吗? 用
v4l2-ctl --get-ctrl trigger_mode可以读取当前模式。
用mv_mipi_i2c.sh也可以的。具体查一下文档。 -
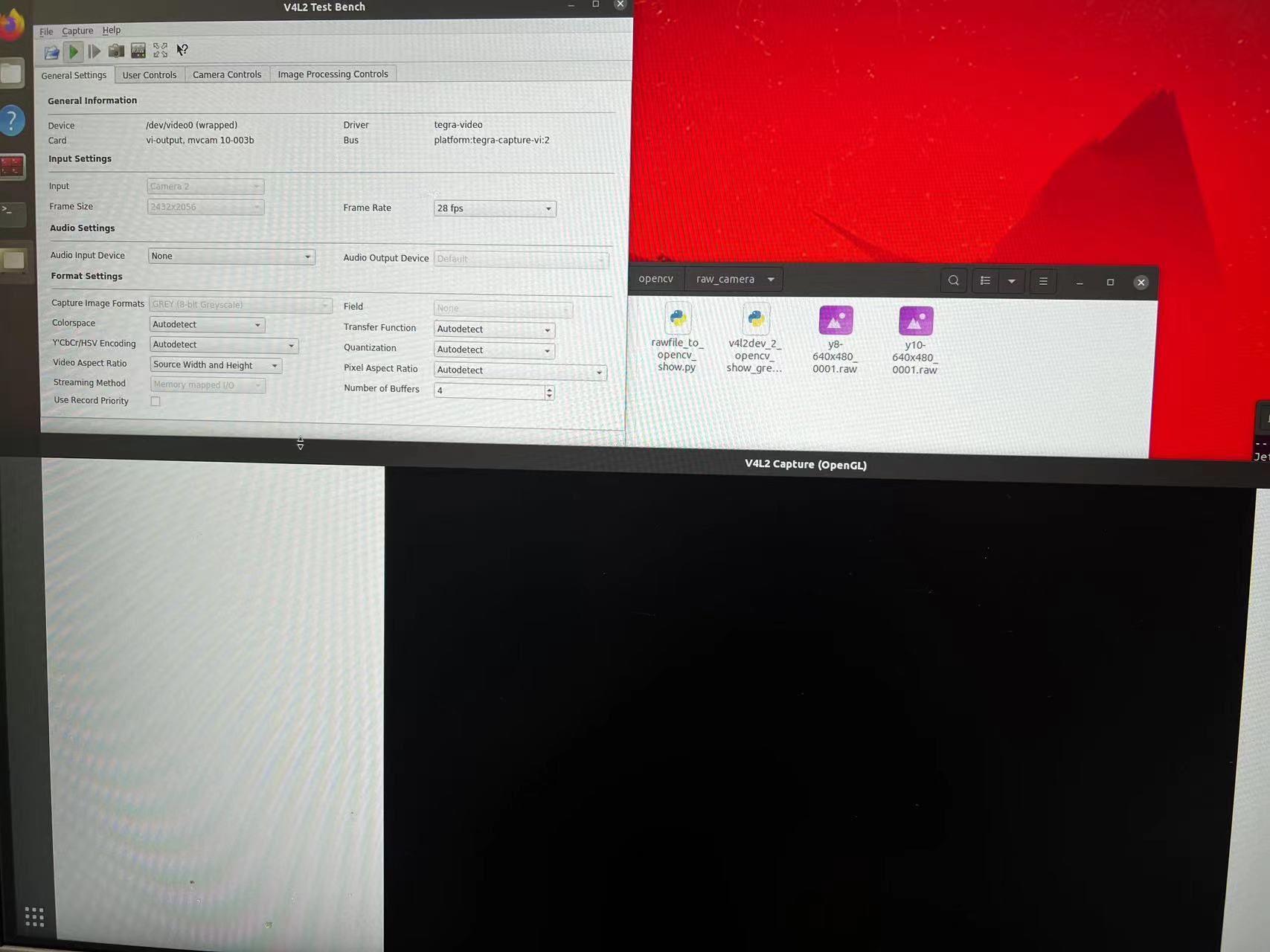
@veye_xumm 不好意思理解错了,我这个是流模式的,我用您提供的sample中的 show.grey.py文件可以看见图像但帧率极低,用qv4l2却看不到图像,显示一片黑

-
@lakers said in orin nano4g板卡使用MV-MIPI-IMX264M的问题:
我用您提供的sample中的 show.grey.py文件可以看见图像但帧率极低,用qv4l2却看不到图像,显示一片黑
python这个demo是帧率很低的。因为是纯软件跑到cpu上作的数据搬移。你回头开发自己的程序的时候,可以避免这一点。
qv4l2这个可能是因为分辨率太高了,qv4l2这个软件的兼容性的问题。
整体来看,我觉得驱动已经通了,你可以跑跑我们wiki上其他的例子了。
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login