@stiwana
@stiwana said in MV-MIPI-GMAX4002M compatibility with Jetson Xavier NX, Orin NX:
Can I use the commonly available RPi-zero Mipi camera FPC to connect the camera to Jetson Orin NX?
Yes.
@stiwana said in MV-MIPI-GMAX4002M compatibility with Jetson Xavier NX, Orin NX:
Is there anything else I can do to increase the low-light performance? Did i miss another setting that can help?
To improve performance in low-light conditions, the main methods are:
Use a lens with a smaller F-number.
In either automatic or manual exposure mode, extend the exposure time to the maximum duration you can tolerate. (Note that the exposure time cannot exceed the reciprocal of the frame rate, so you may need to adjust it accordingly based on your specific situation.)
Increase the gain.
@stiwana said in MV-MIPI-GMAX4002M compatibility with Jetson Xavier NX, Orin NX:
I do notice that at higher gain the images get these fixed patterns probably due to the FPNU or PRNU of pixel array. Is there a way to do a calibration on the image sensor to make the image response more uniform?
Sorry, we don't offer this algorithm yet.
@stiwana said in MV-MIPI-GMAX4002M compatibility with Jetson Xavier NX, Orin NX:
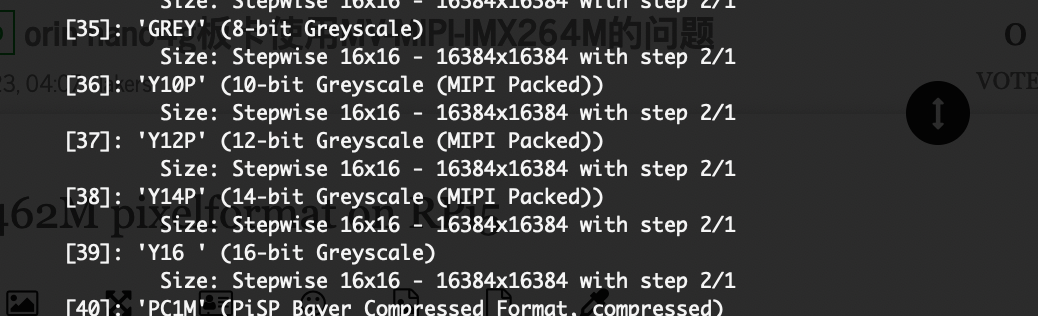
Is there any gstreamer pipeline I can use to get 12 bit image stream out and display it as 8bit in real time?
Sorry, we don't provide this kind of program either.