L
Offline
Posts
-
RE: RAW-MIPI-AR0234M 在NX平台下,2lane和4 lanes都无法采图
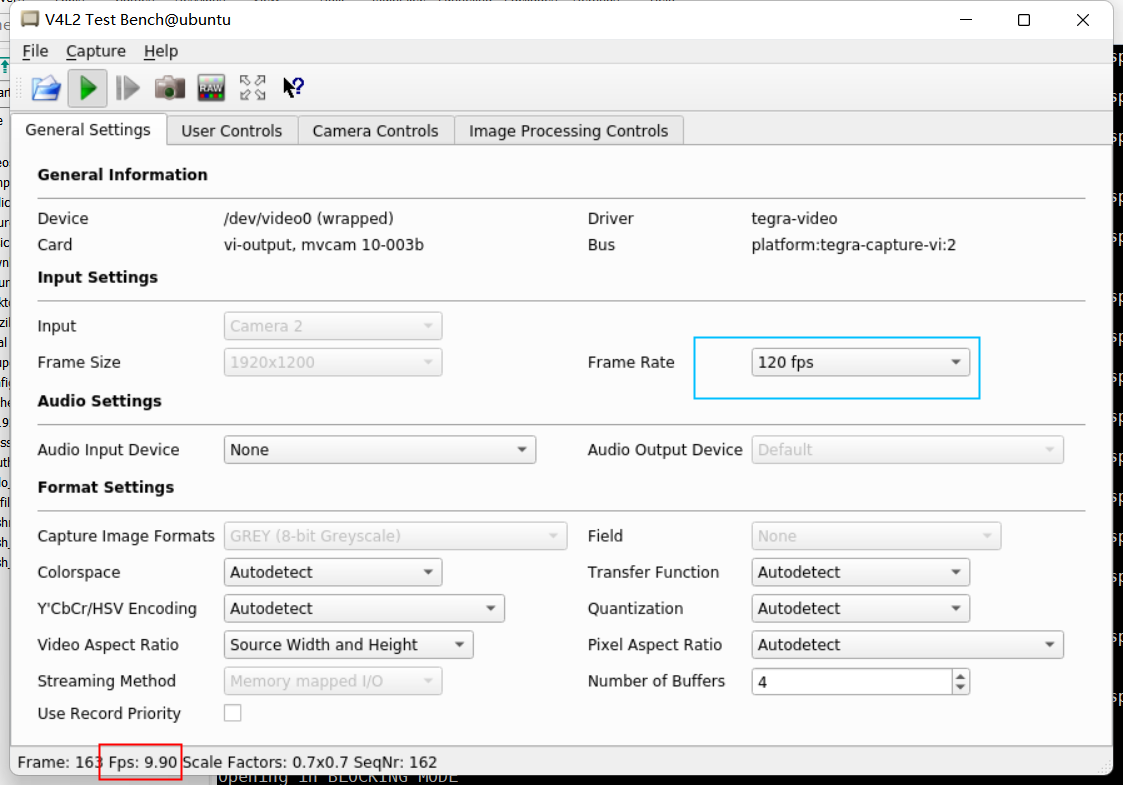
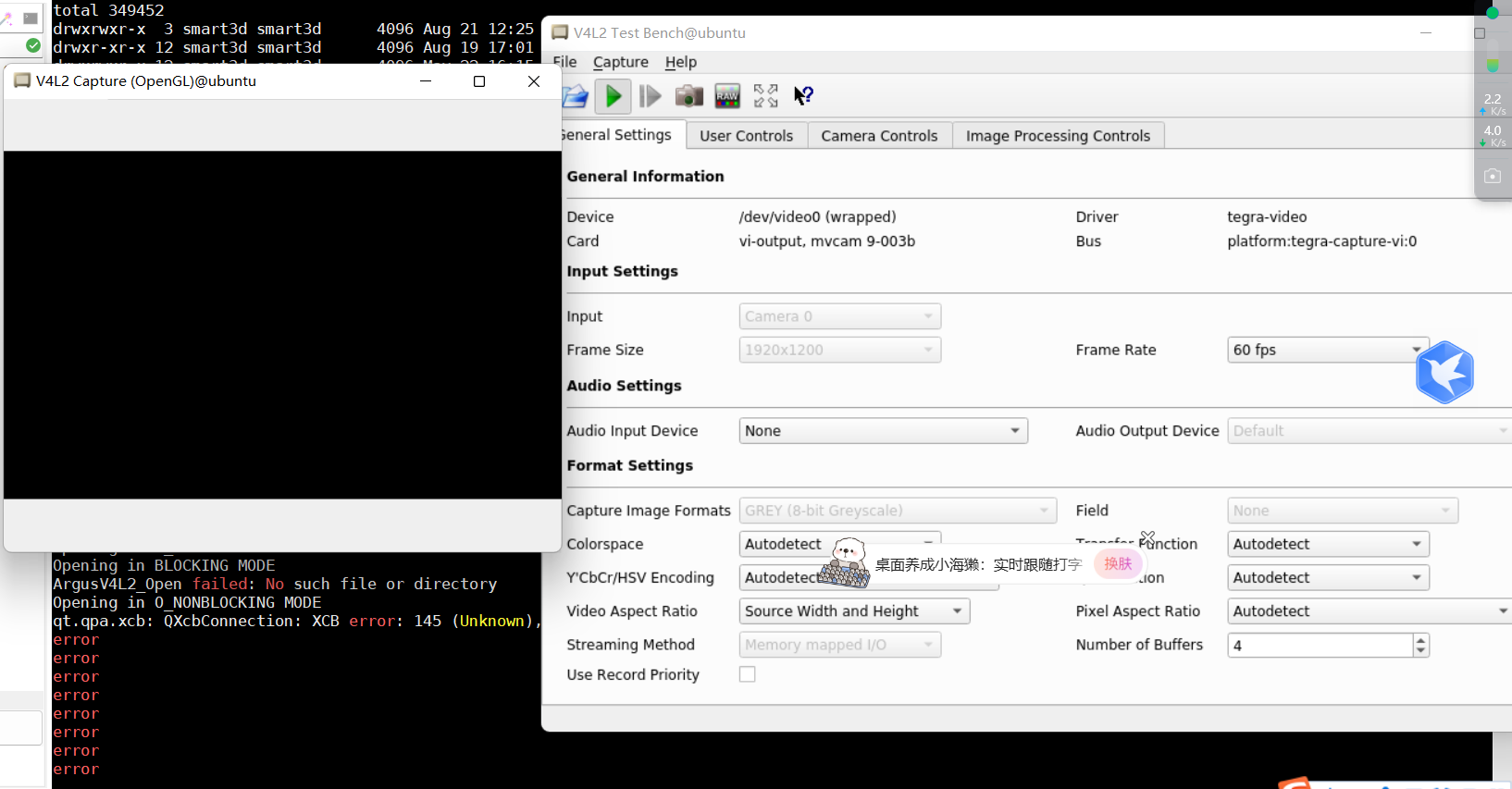
4lane模式下有图了,相机也设置成了4 lanes,dtbs也是更换成了4 lanes的驱动,但是采集帧率缺还是60 fps,请问是哪里设置的不对吗?
-
RE: RAW-MIPI-AR0234M 在NX平台下,2lane和4 lanes都无法采图
@veye_xumm 好的 留一个您的收件地址和联系方式。
-
RE: RAW-MIPI-AR0234M 在NX平台下,2lane和4 lanes都无法采图
@veye_xumm
我们安装您的方法(修改“bus-width”为4;修改 “num_csi_lanes”为“8”),也将固件升级到1.09,
但是4 lanes依然只能找到相机,而无法采集到图像
您们可否提供4 lanes的驱动(?我们目前相用它替换掉我们成熟产品里使用的AVT mipi相机。希望得到您们的支持)
我们的环境:
使用的硬件平台是:jetson Xavier NX
-
RE: RAW-MIPI-AR0234M 在NX平台下,2lane和4 lanes都无法采图
@veye_xumm 这个问题已经解决。
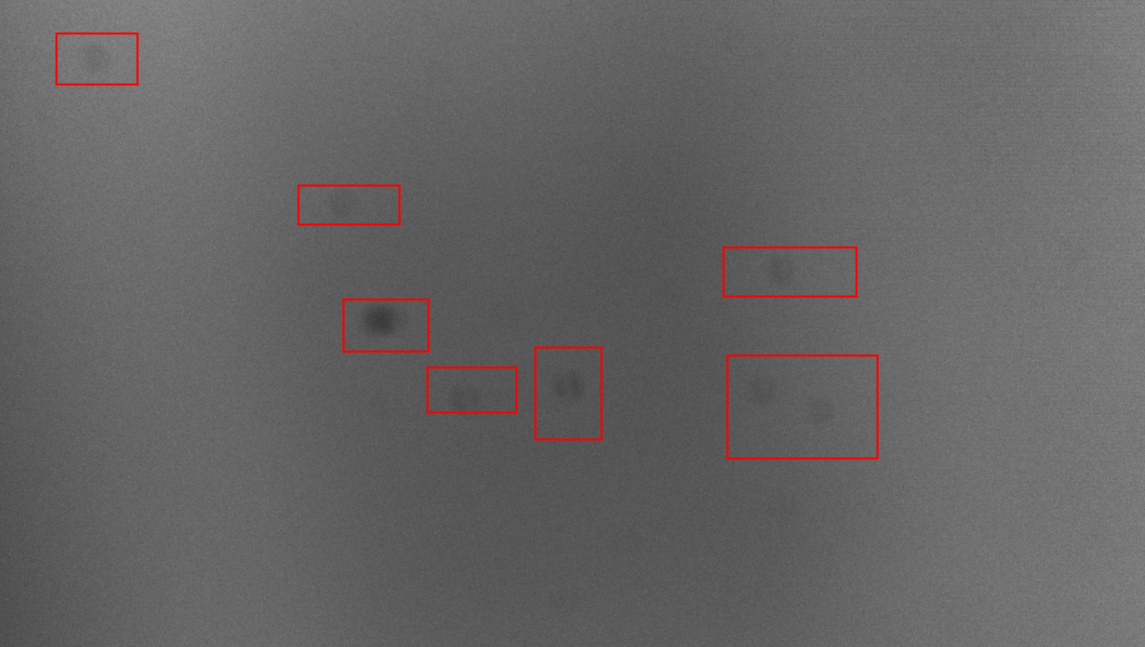
2 lanes下可以采集图像,但是有1个问题(采集到的图像上面有固定的脏污,是因为sensor不洁净导致的吗?):
另外,可否提供4 lanes Jetson NX RAW-MIPI-AR0234m的驱动?
-
RE: RAW-MIPI-AR0234M 在NX平台下,2lane和4 lanes都无法采图
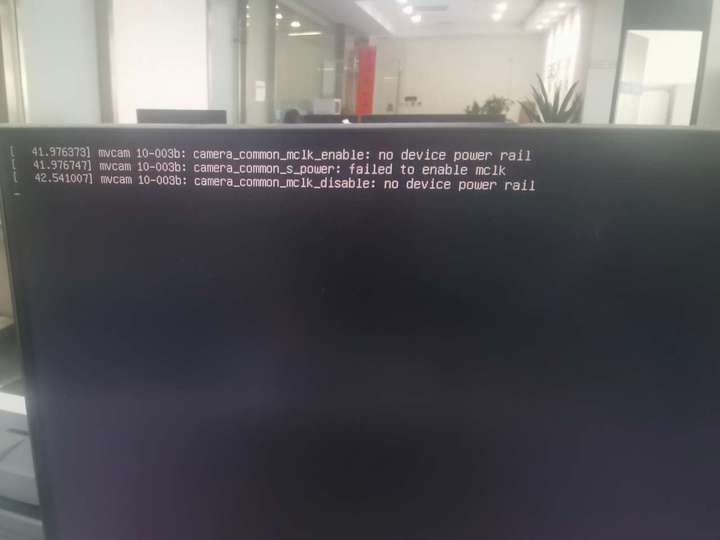
@veye_xumm 在2lanes模式下使用qv4l2可以正常采集到图像。但是采集了30多分钟,板子从启后,无法进入板子系统,且报下列错误:
-
RE: RAW-MIPI-AR0234M 在NX平台下,2lane和4 lanes都无法采图
@veye_xumm 还发现一个问题:
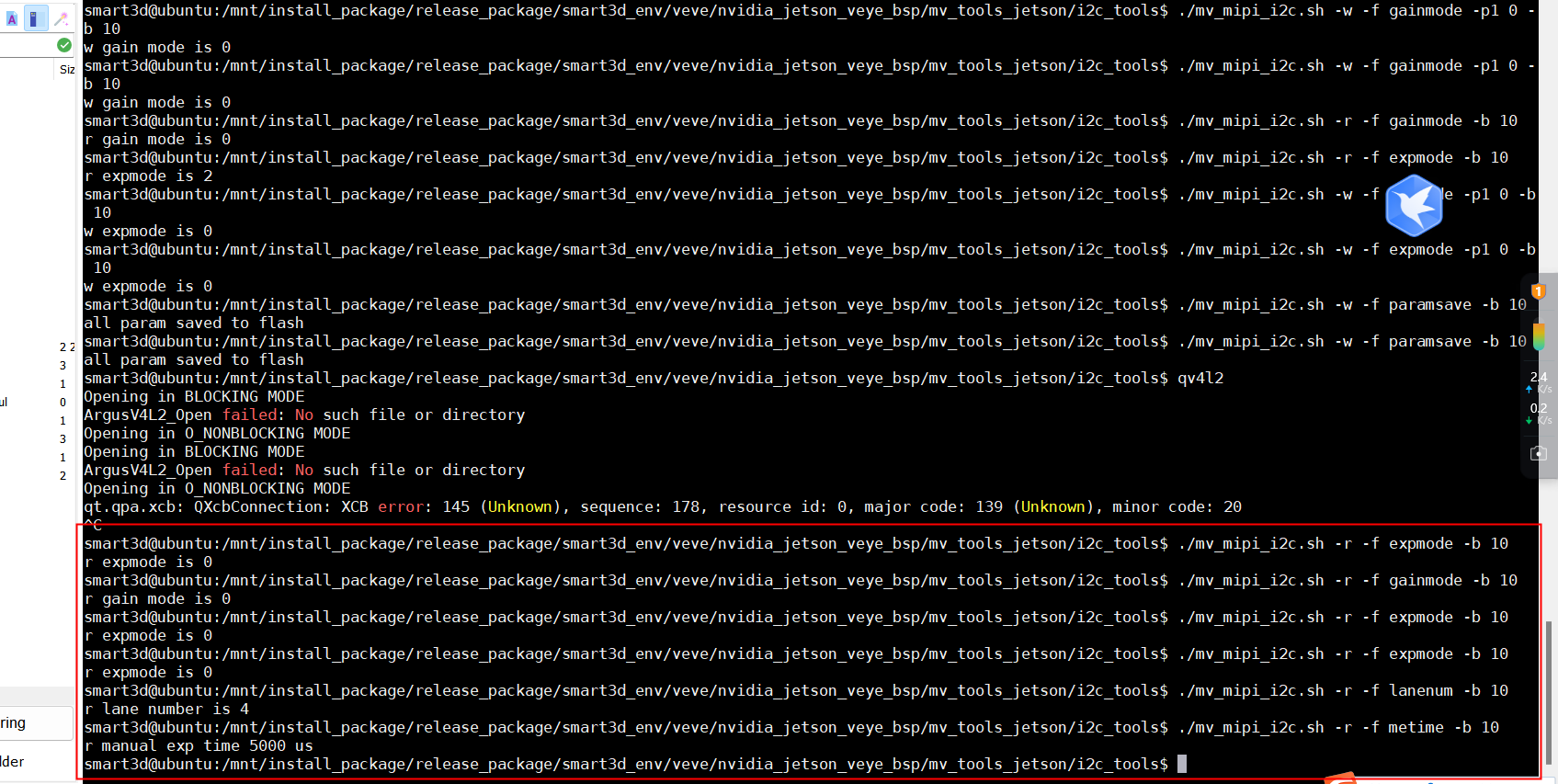
使用“./mv_mipi_i2c.sh -w -f paramsave -b 9”保存参数后,相机断电重启后,参数又恢复为了默认参数。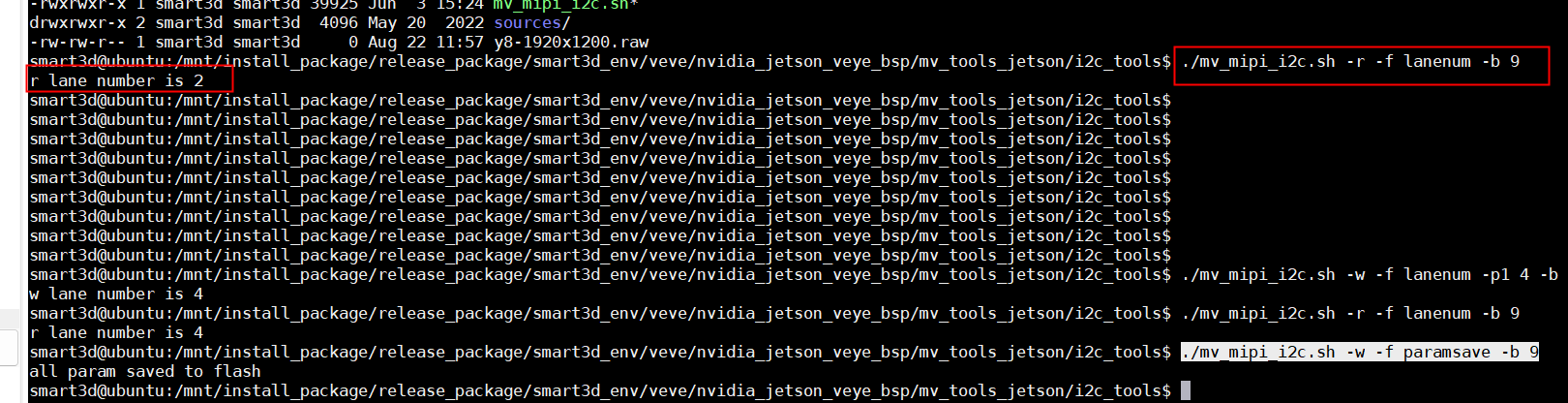
-
RE: RAW-MIPI-AR0234M 在NX平台下,2lane和4 lanes都无法采图
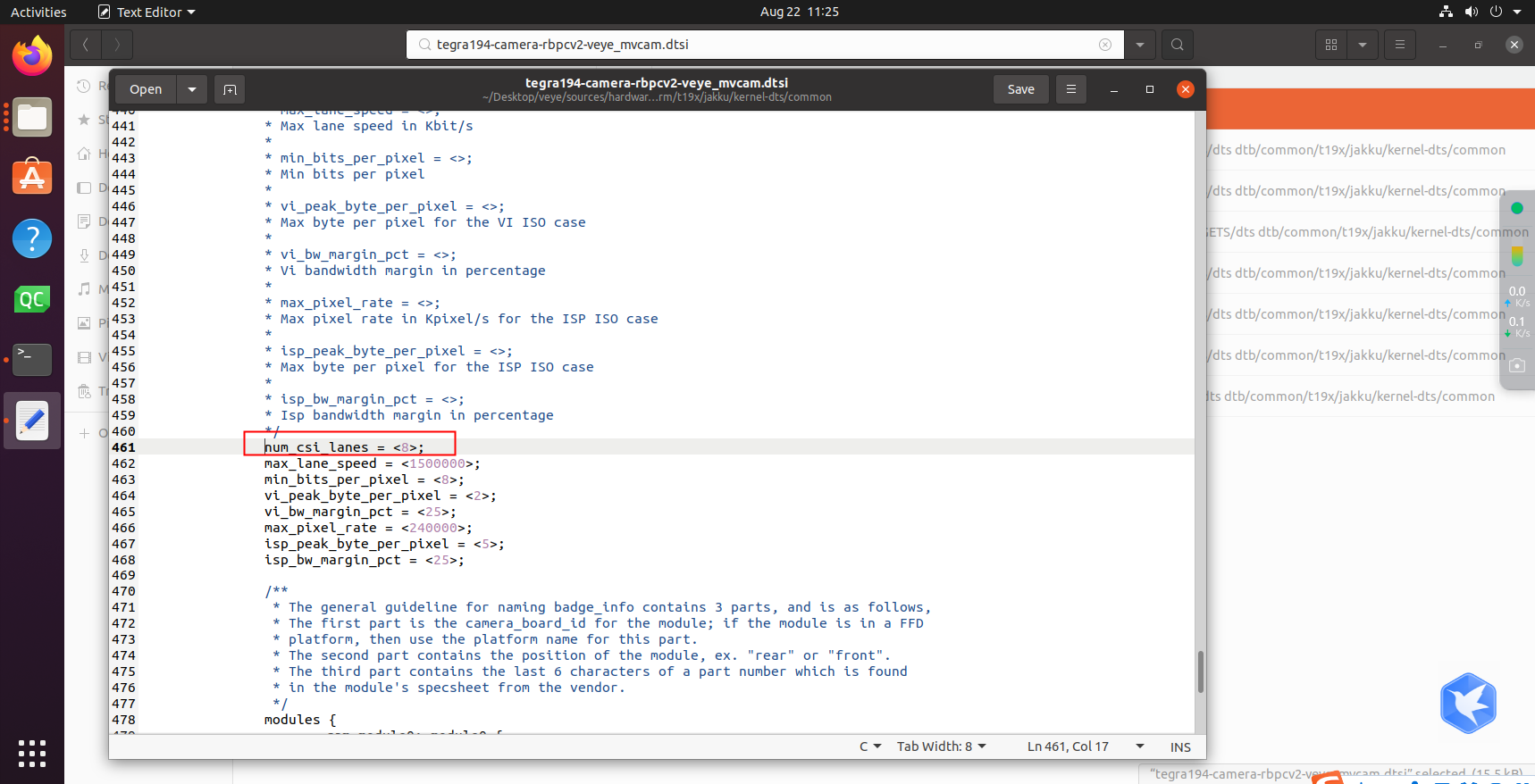
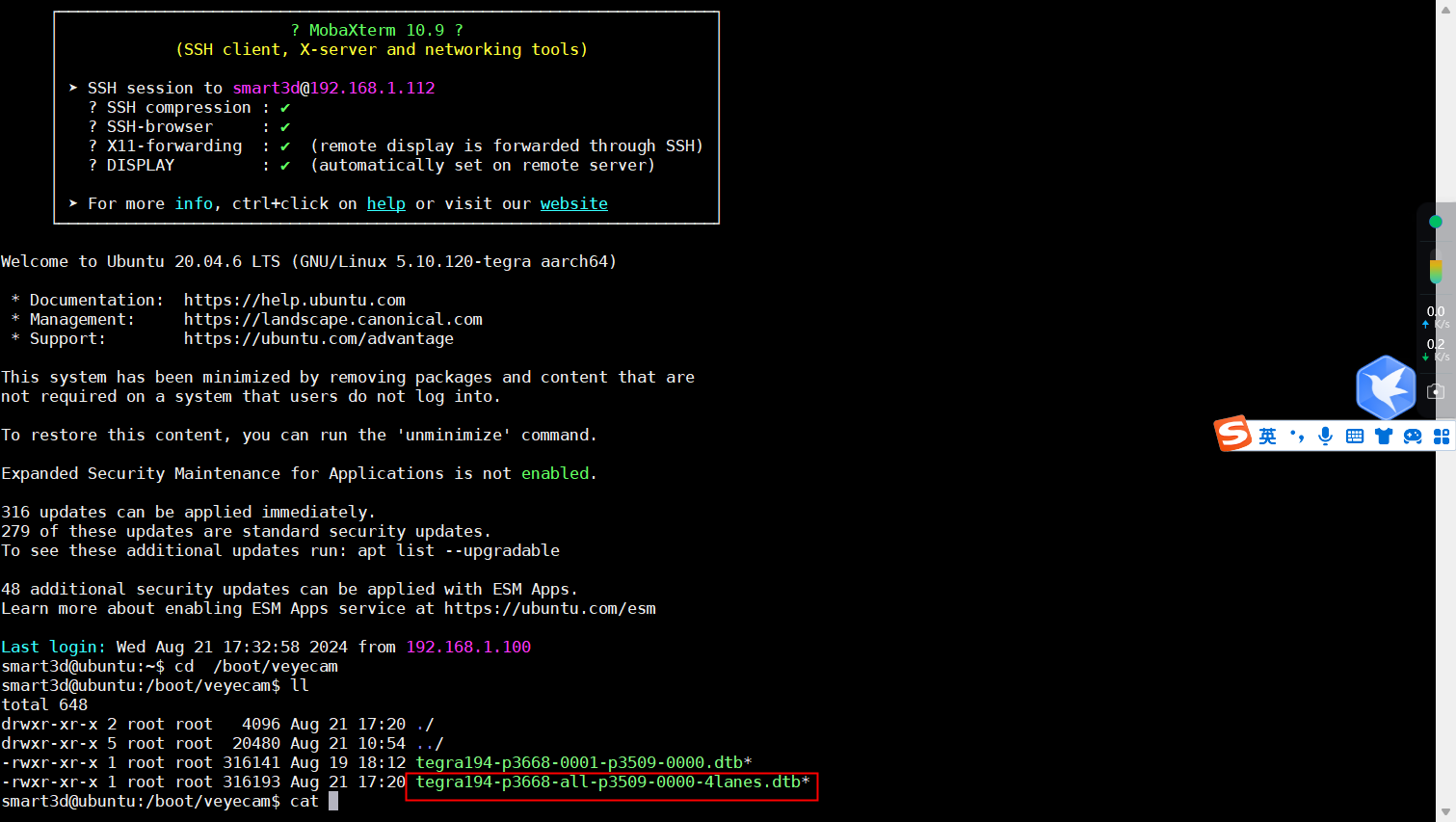
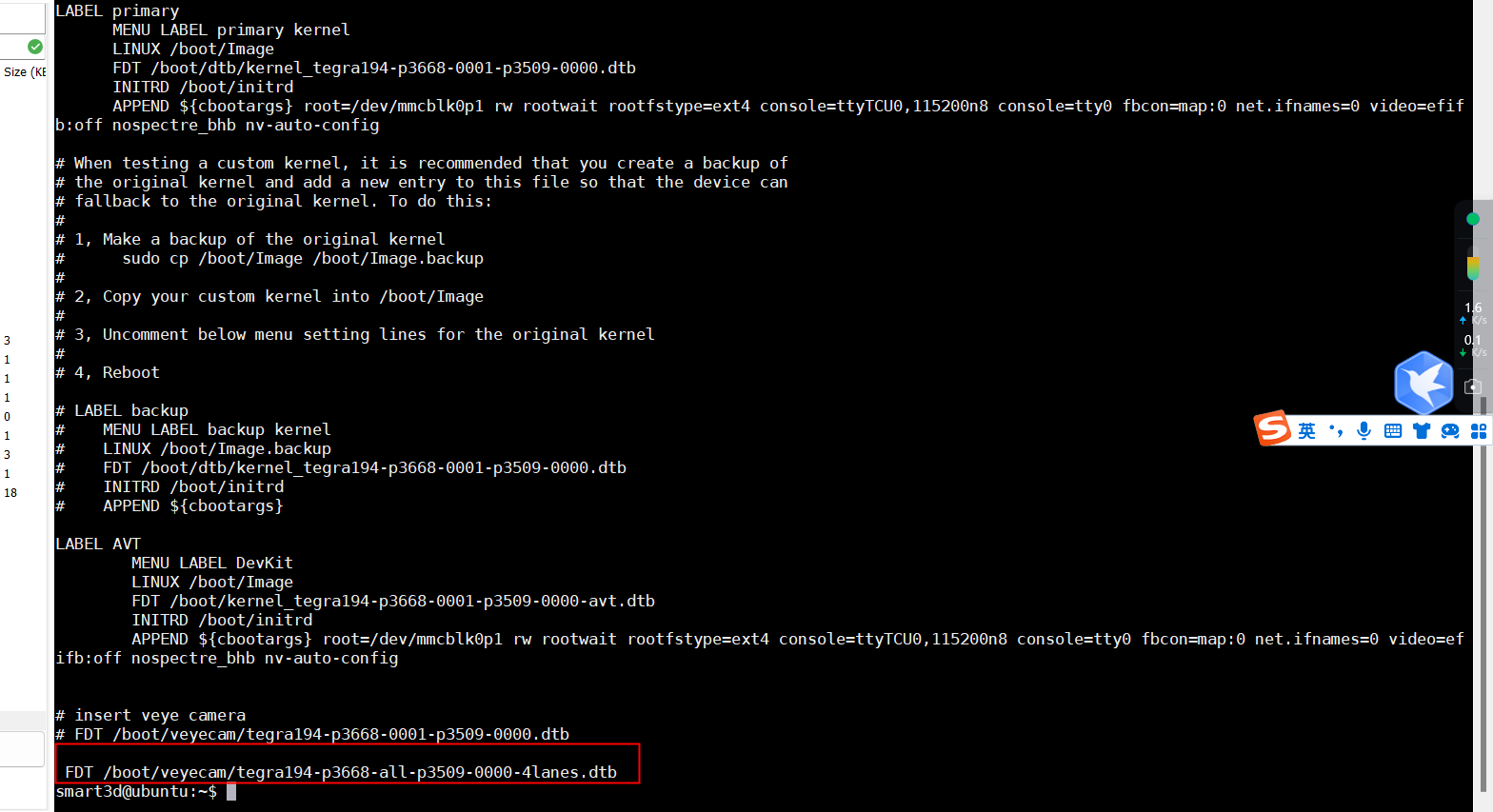
@veye_xumm 将“num_csi_lanes ”改为了8,进行从新编译:
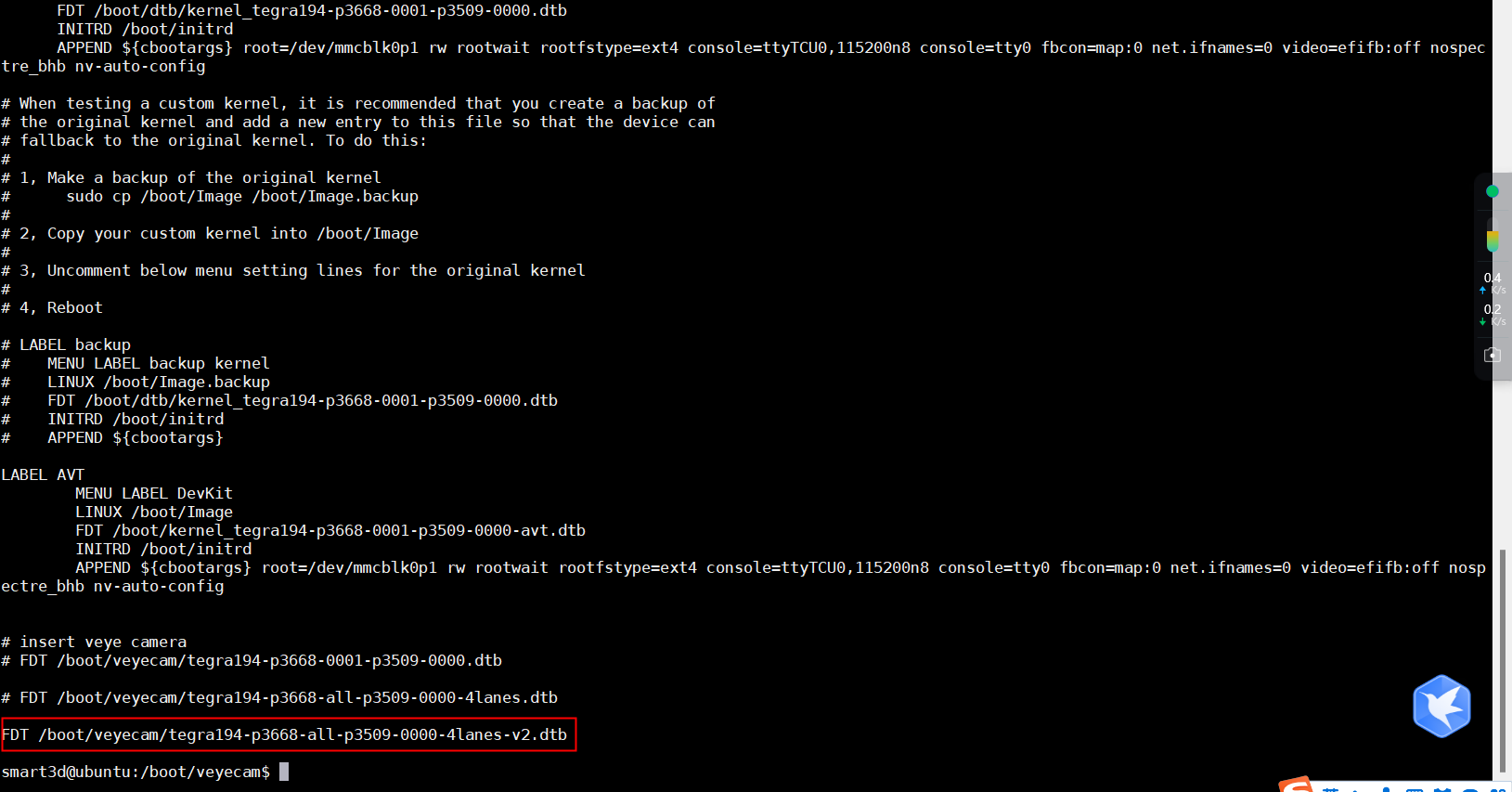
并将生成的“tegra194-p3668-all-p3509-0000-4lanes-v2.dtb”进行更新:

并“sudo depmod”从启后,问题依然!!!
-
RE: RAW-MIPI-AR0234M 在NX平台下,2lane和4 lanes都无法采图
@veye_xumm
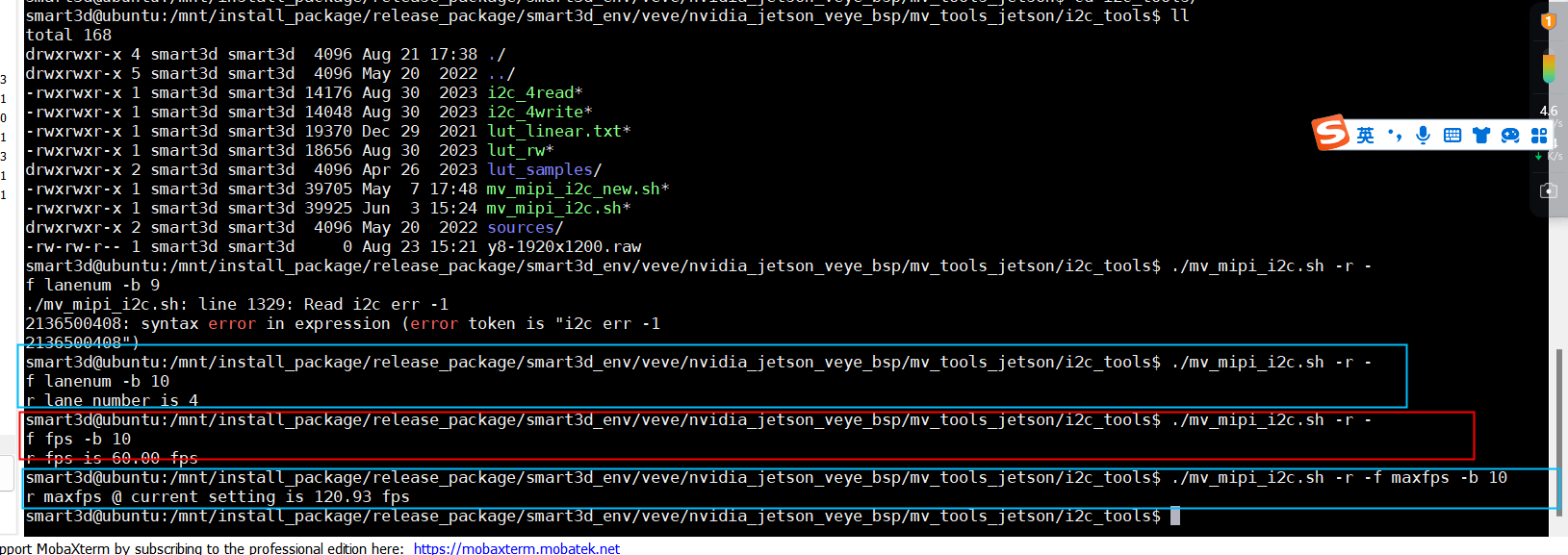
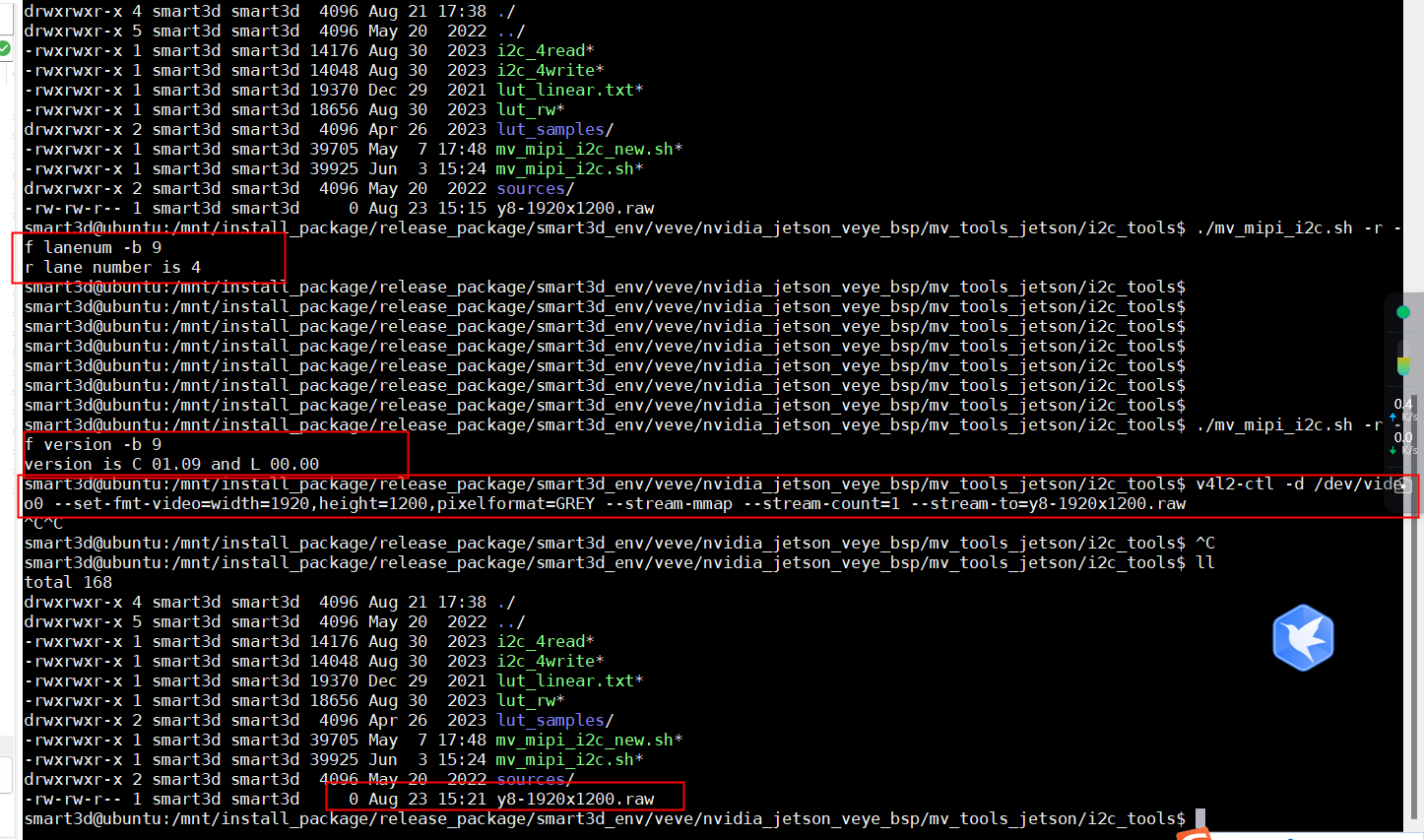
2、使用“./mv_mipi_i2c.sh -r -f lanenum -b 9”确认输出为4 lanes,最大帧率120fps。

3、问题依然
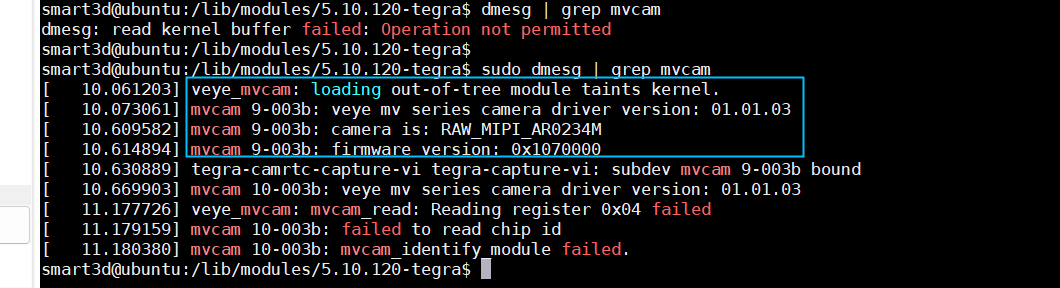
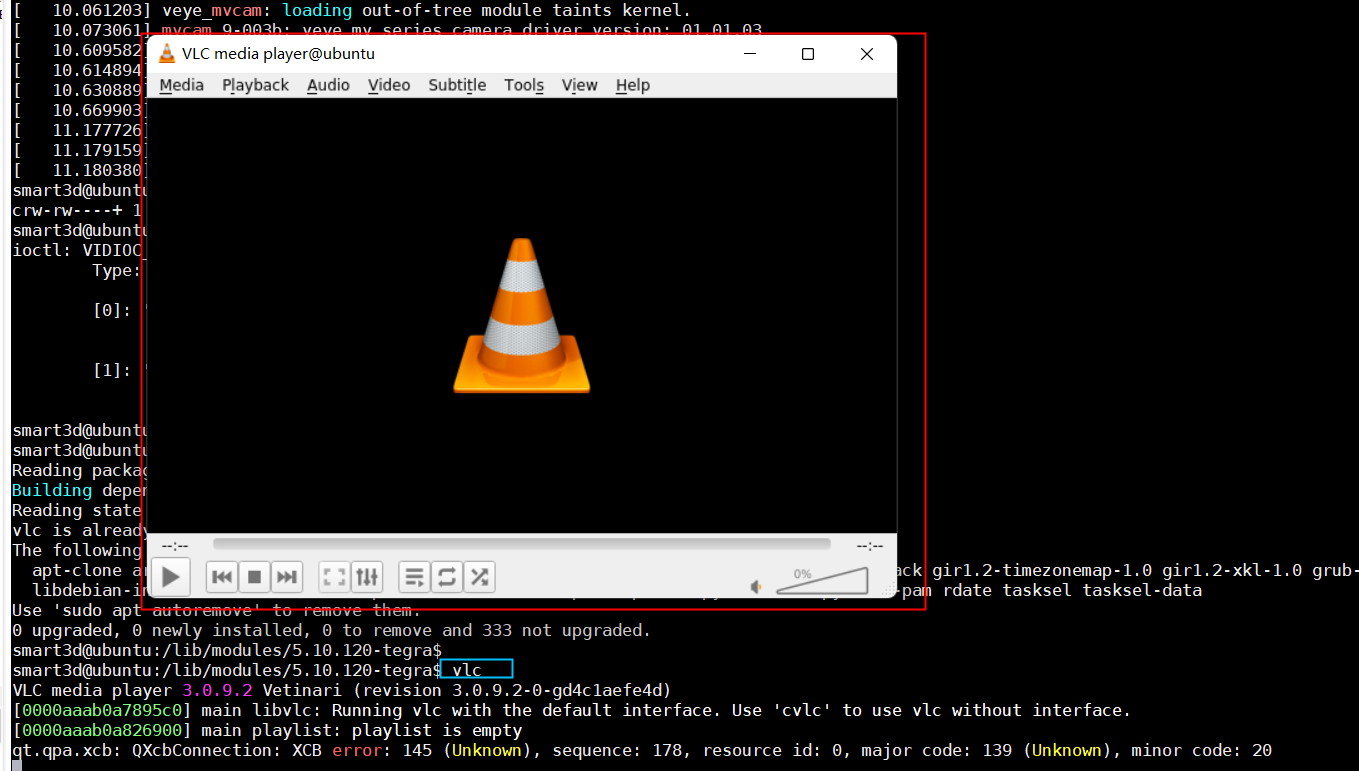
4、“v4l2-ctl”和“vlc”都试过,无法采集图像;“sudo dmesg”没有报错。

5、指的将“num_csi_lanes = ”改为“num_csi_lanes = <8>”?6、是使用的........\dts dtb\RAW-MIPI-AR0234M\路径下的dtsi,但是自己编译的dtsi,并没有“RAW-MIPI-AR0234M”路径,有个疑问是我们自己编译的“dts”文件怎么就能确定是与“RAW-MIPI-AR0234M”匹配?在编译过程中并没有发现与““RAW-MIPI-AR0234M””绑定的相关操作
-
RAW-MIPI-AR0234M 在NX平台下,2lane和4 lanes都无法采图
(1)硬件条件
NX mipi口线序见下图:
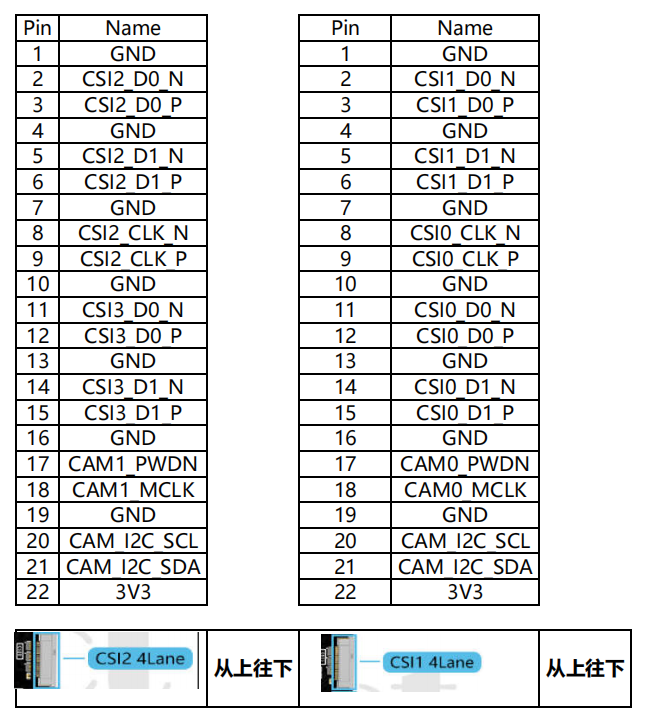
因为NX MIPI接口与相机线序不同(刚好相反),使用转接板进行线序转接。(2)软件环境
NX系统:ubuntu 20.04
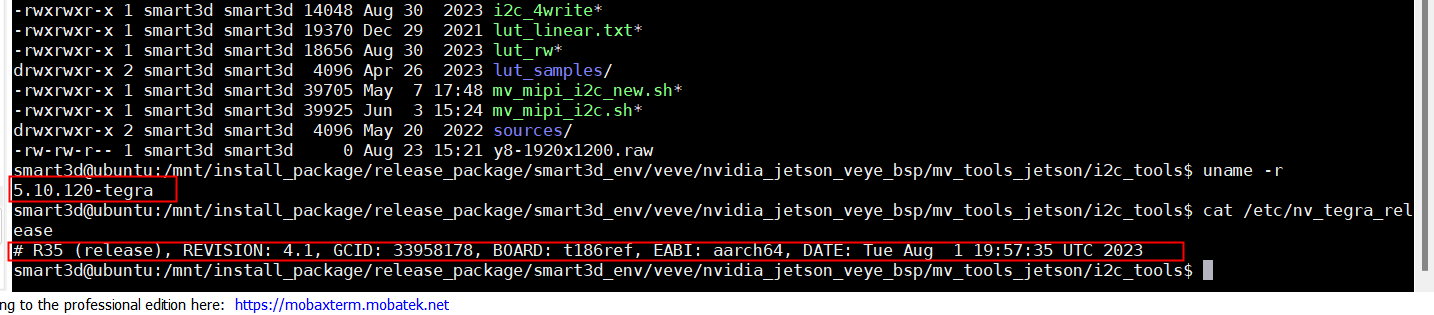
NX使用系统内核版本:# R35 (release), REVISION: 4.1, GCID: 33958178, BOARD: t186ref, EABI: aarch64, DATE: Tue Aug 1 19:57:35 UTC 2023
jetpack版本:5.10.120-tegra
RAW-MIPI-AR0234M驱动版本:nvidia_jetson_veye_bsp v1.29(3)问题描述
① 使用“nvidia_jetson_veye_bsp v1.29”源码编译支持4 lanes的“dbt”文件,编译生成了“egra194-p3668-all-p3509-0000.dtb”文件,将“egra194-p3668-all-p3509-0000.dtb”文件更新到NX板子上,相机无法采图,使用“./mv_mipi_i2c.sh -r -f maxfps -b 9”命令输出最大帧率60fps,如图:

②具体编译过程见下图(修改所有的“bus-width”为4):
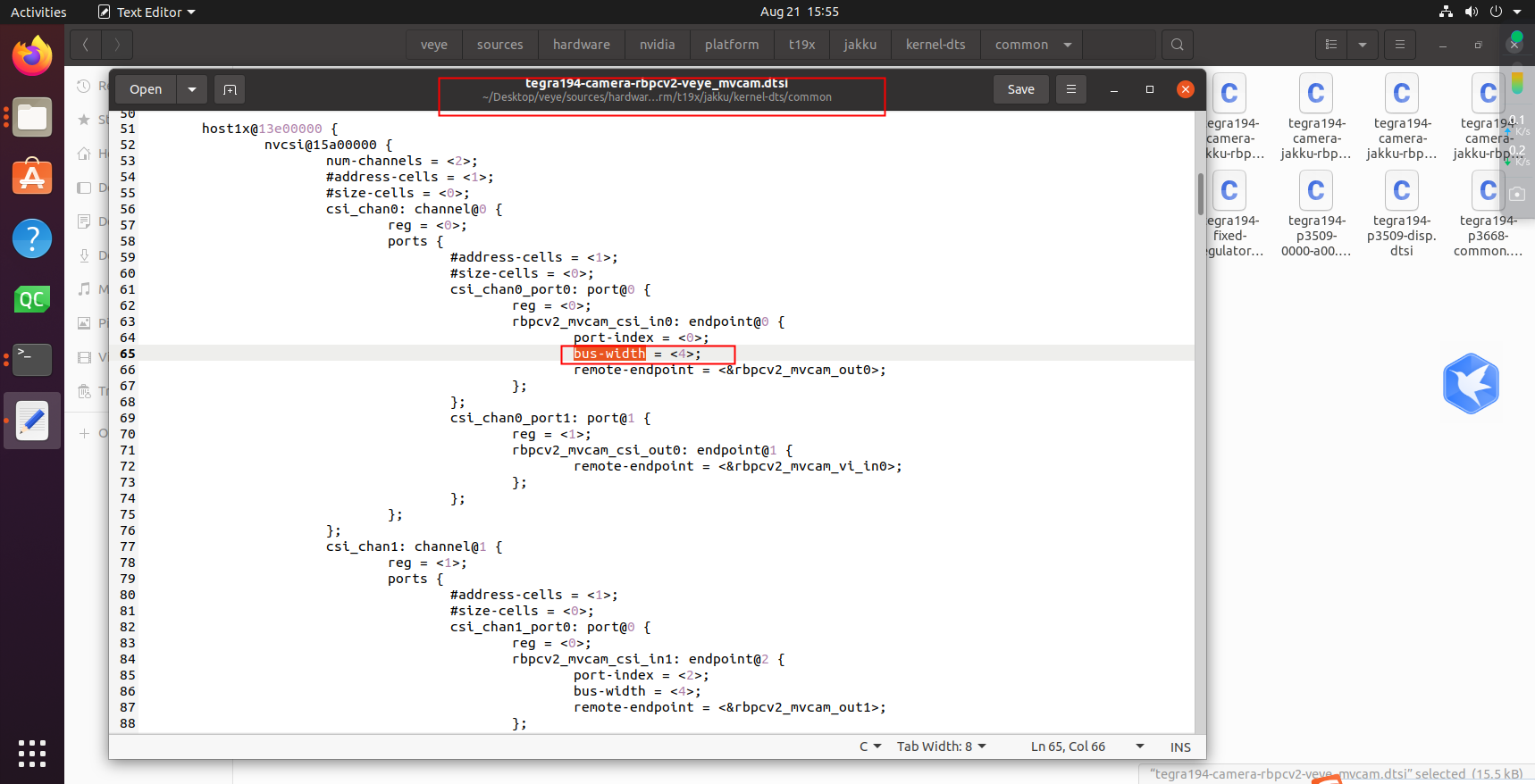
并编译输出“egra194-p3668-all-p3509-0000.dtb”文件:
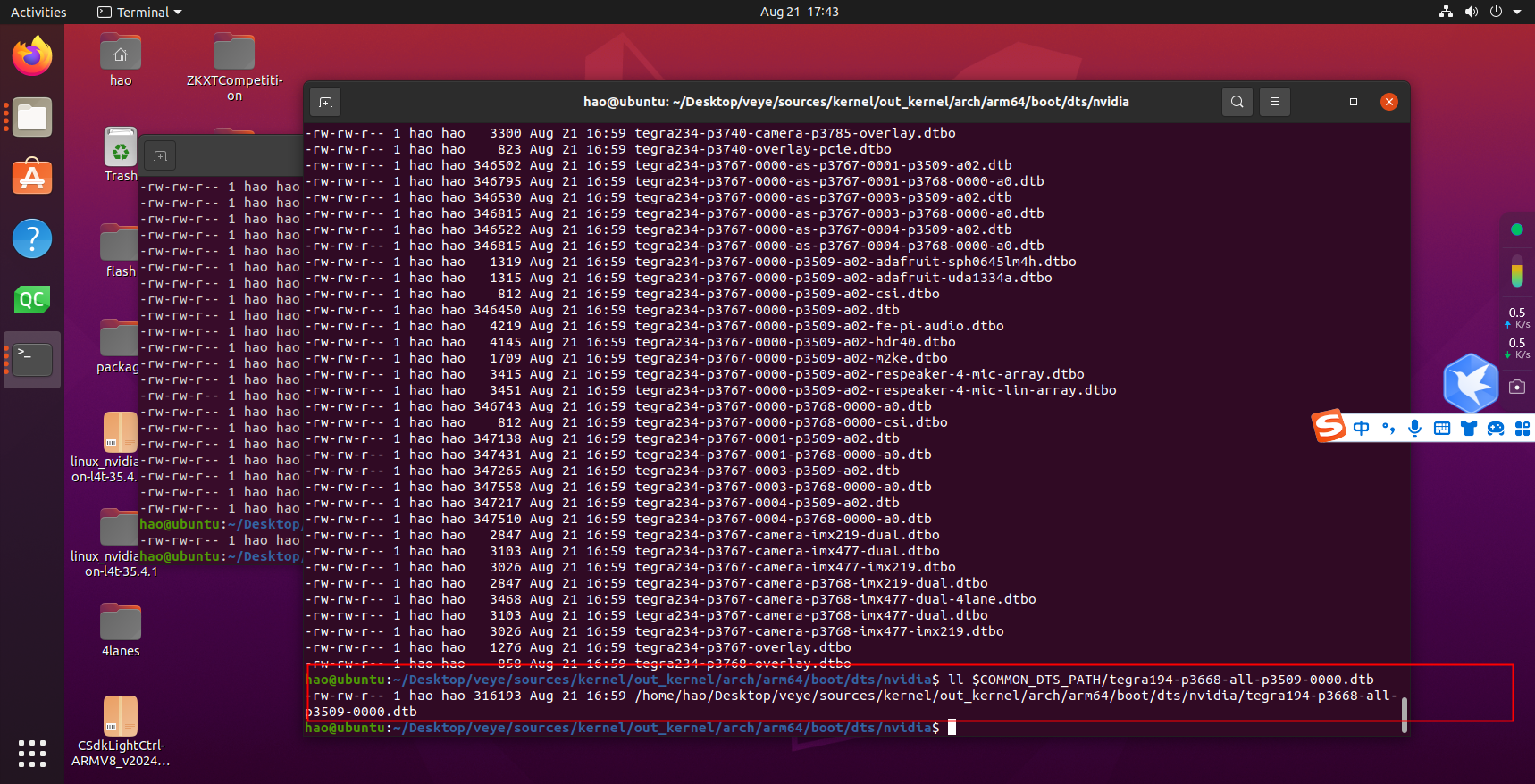
③ 将“egra194-p3668-all-p3509-0000.dtb”更新到NX板
④ 使用“./mv_mipi_i2c.sh -w -f lanenum -p1 4 -b 9”和“./mv_mipi_i2c.sh -w -f paramsave -b 9”命令设置相机并保存,然后板子及NX断电重启。

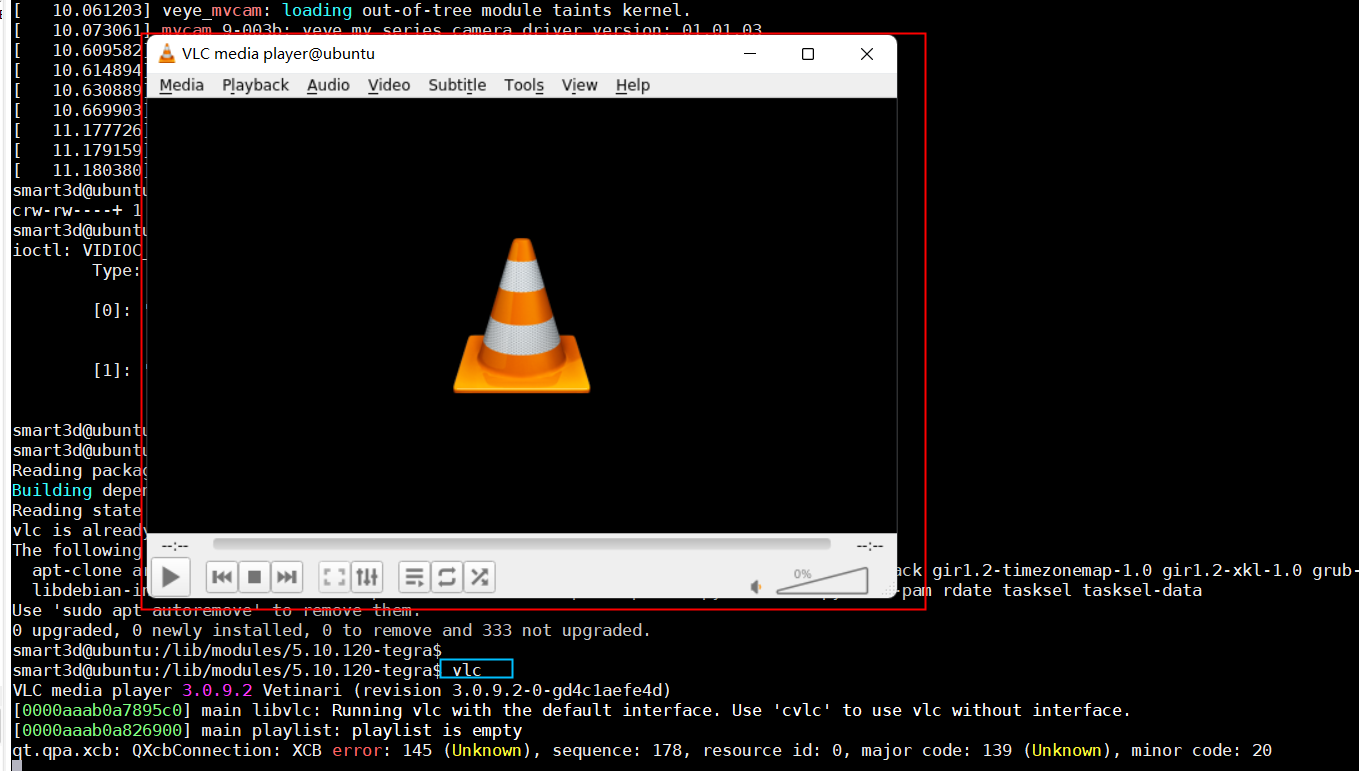
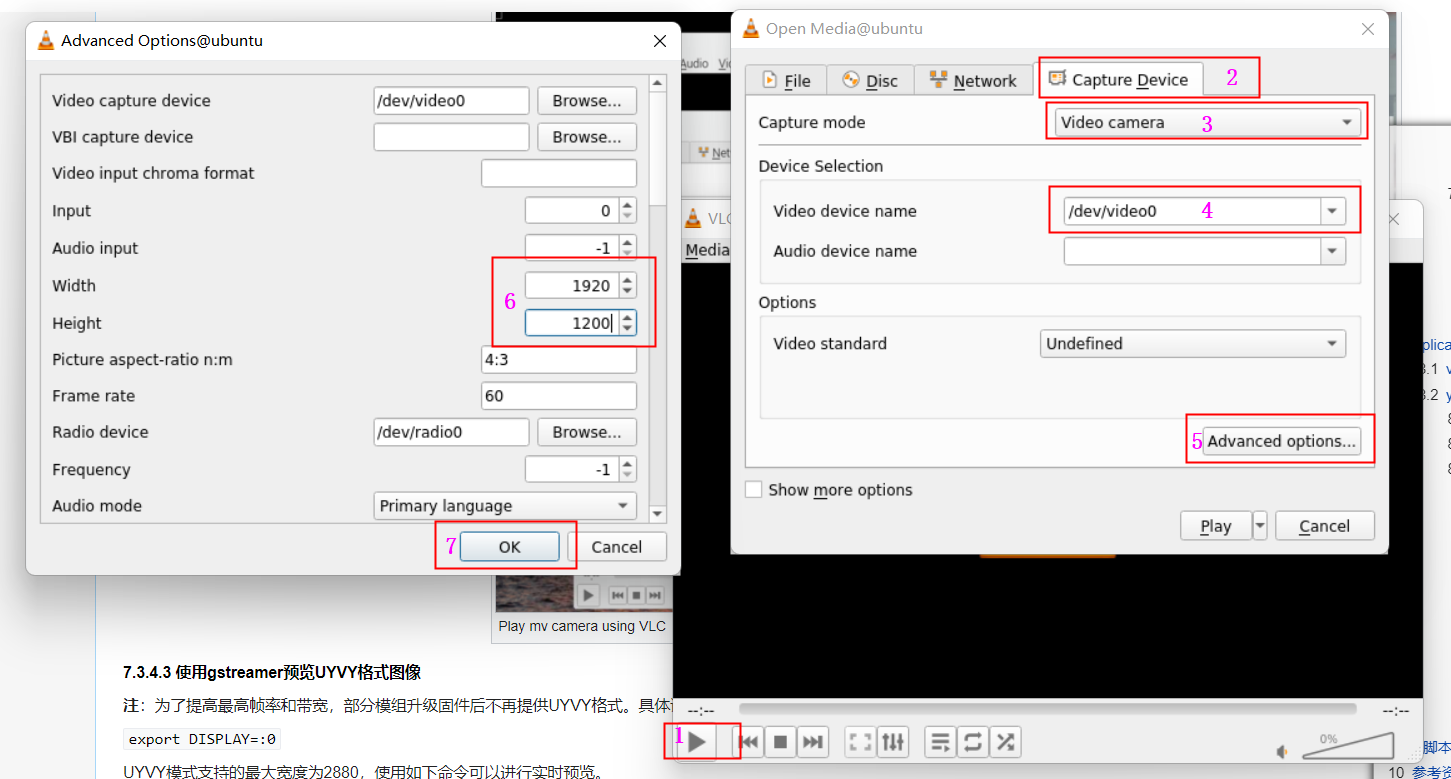
使用“vlc”采集图一直没有图像:
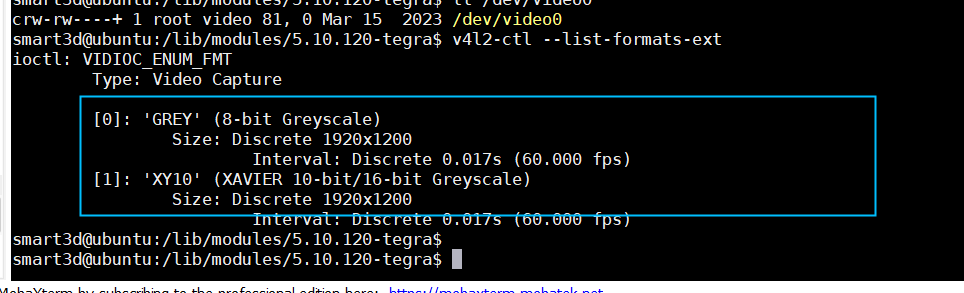
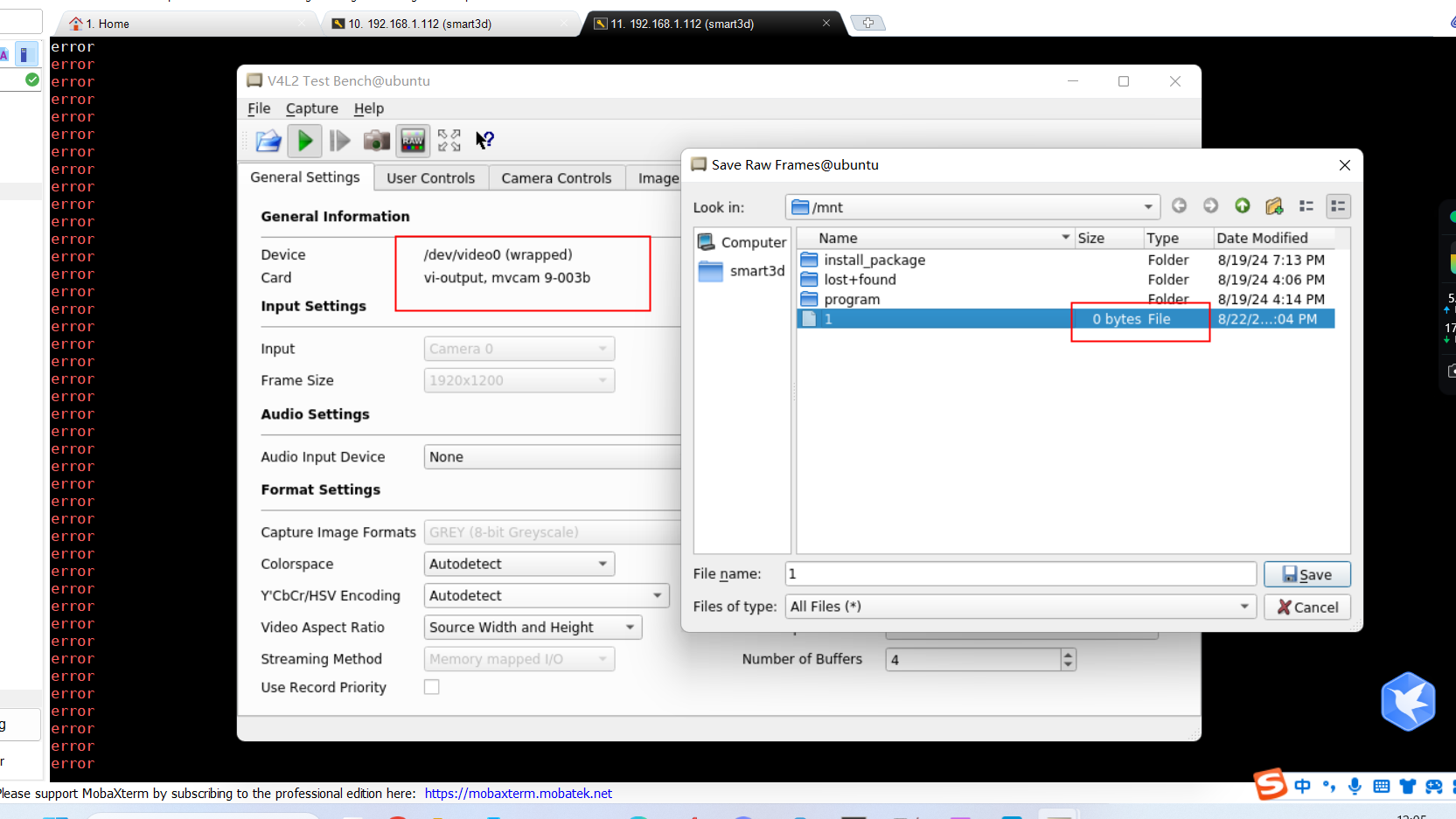
使用“v4l2-ctl -d /dev/video0 --set-fmt-video=width=1920,height=1200,pixelformat=GREY --stream-mmap --stream-count=1 --stream-to=y8-1920x1200.raw
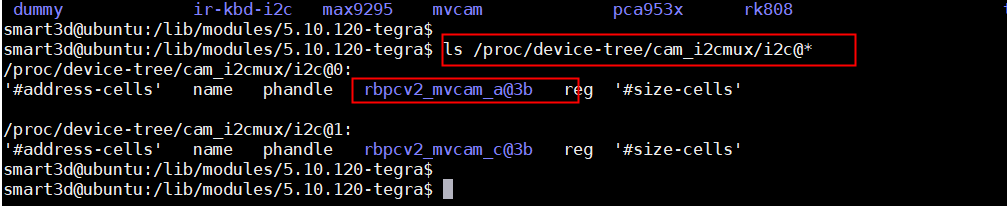
”一直卡住,输出的图像文件“y8-1920x1200.raw”大小为"0 kb"。疑问:在NX平台型下使用2 lane和4lane,都无法采集图,而使用i2c命令可以找到相机。