@veye_xumm
哦 这样是不行的 刚刚是我忘记把args.width从2304改回默认值了,2432的内存还是撕裂的
D
Offline
Posts
-
RE: SC535M设置默认相机参数画面显示不正常的问题
-
RE: SC535M设置默认相机参数画面显示不正常的问题
@veye_xumm
rolling shutter 我可以理解为滑动窗口吗 我其实只关注这个镜头能不能摄制出大于500w像素的黑白原始照片 还有就是能不能同样适配到jetson tx2上,只要重新更新dtbs和img就能在我不改变我代码的基础上直接用 其他的方面我不是很关心 -
RE: SC535M设置默认相机参数画面显示不正常的问题
@veye_xumm
我并不打算折腾更改linux源码,因为这样存在风险。除非你们已经试验过,请确认一下这样做不会导致后续有潜在的内存问题。
我现在正在考虑要不要换更好的图像传感器代替535M,比如我问你家客服的这款

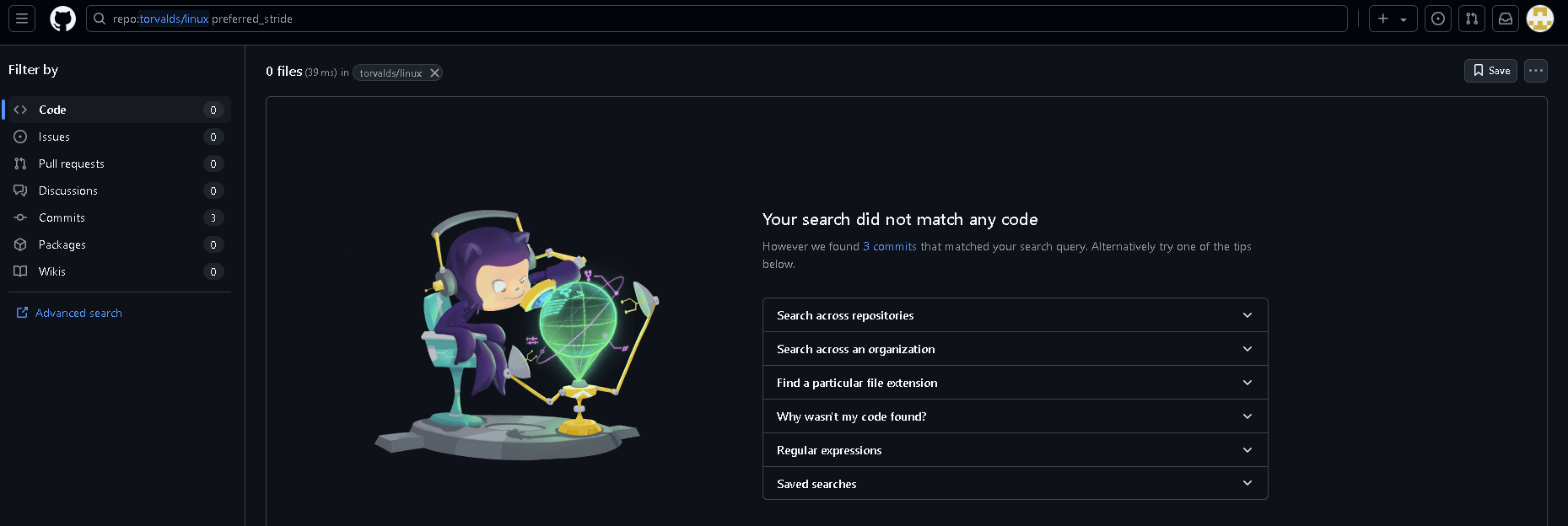
这款能不能同样用ADP-N5转接板呢? 如果能,我就把535退了,换这个型号的传感器我刚刚找了linux代码仓库 发现没有preferred_stride 的关键字相关搜索结果
-
RE: SC535M设置默认相机参数画面显示不正常的问题
@veye_xumm
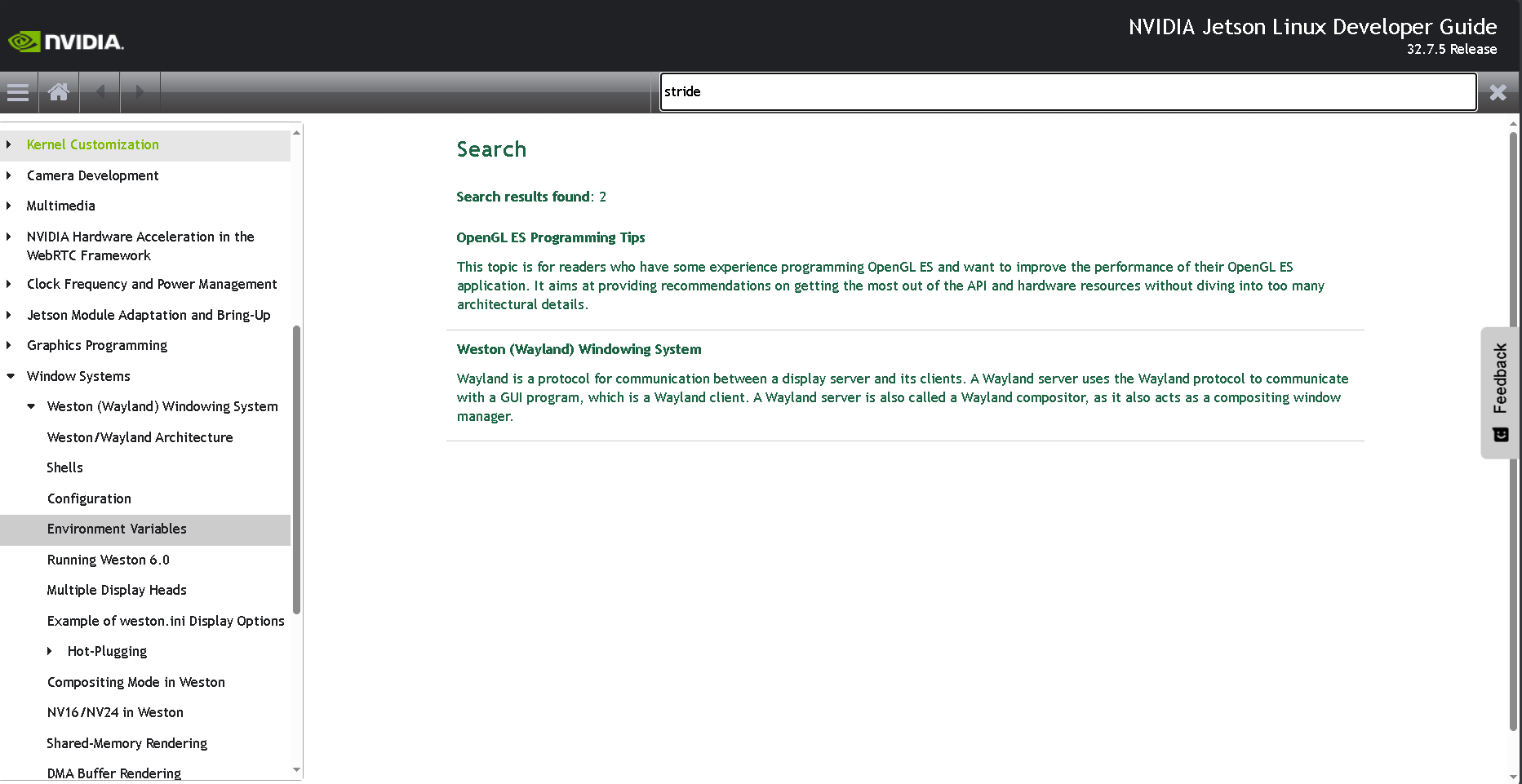
你好 能否给出相关的keyword,nVidia的官方doc体量太大了 搜索stride就找到这两个东西 看起来都不相关如果在Google和baidu bing等上搜索stride的话,出来的全是深度学习的步长stride
-
RE: SC535M设置默认相机参数画面显示不正常的问题
@veye_xumm 我有一个猜想,不知道对不对,那就是实际预览的时候 程序只会按照你设置的width和height去分配内存大小去展示图片,preferred_stride 这个参数只适用于硬件层面去分配图片内存大小?
但是,这样的话,虽然一张图片被分配了25602048个字节,但其实像素还是只有24482048?
-
RE: SC535M设置默认相机参数画面显示不正常的问题
@veye_xumm
got it!
但是,要怎么解释我上面那个代码设置preferred_stride之后,/dev/video0的成像还是不正常呢?
我按照你的说法指定了每个设备,即每个命令 --set-ctrl preferred_stride=2560 之前都加了指定的 -d /dev/video*, 但是,当这样设置后,我opencv imshow的全部都不正常了,而且qv4l2也全部不正常,在没有指定-d的情况下 仅/dev/video0 第一路不正常 -
RE: SC535M设置默认相机参数画面显示不正常的问题
@veye_xumm 我按照2448*2048预览的
文件大小一共150M 我抓了30帧 所以一张是5M
一张是5242880字节
-
RE: SC535M设置默认相机参数画面显示不正常的问题
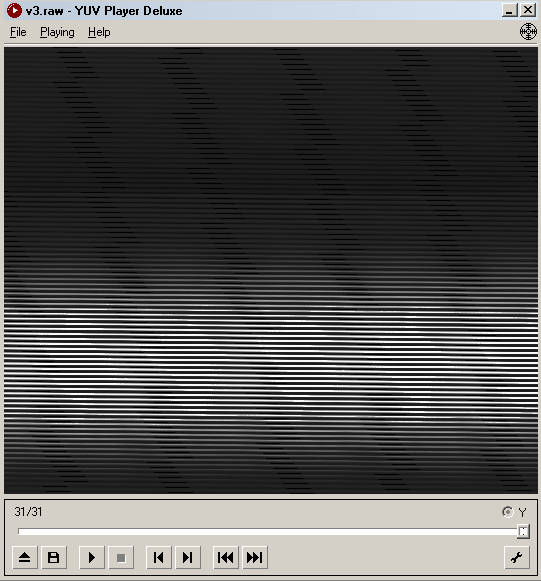
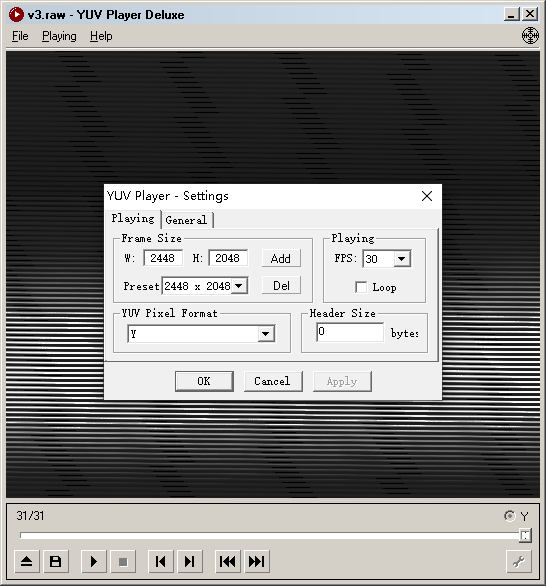
你好 在使用了v4l2-ctl -d /dev/video3 --set-ctrl preferred_stride=2560 --set-fmt-video=width=2448,height=2048,pixelformat=GREY --stream-mmap --stream-count=30 --stream-to=v3.raw之后,我得到了v3.raw,然后我发现效果像是preferred_stride设置并没有生效
-
RE: SC535M设置默认相机参数画面显示不正常的问题
@veye_xumm
现在有一个问题就是opencv无法设置到2560,我试过了 如果v4l2设置了2448,但是opencv宽度改成2304,那么用qv4l2打开发现,最后的宽度还是2304,现在有个问题是我这边需要大于500w像素,24482048=5013504,但是这个在jetson系列上显示不正常,如果用v4l2-ctl的话,则它只能抓一帧存到本地文件里,无法达到实时预览的效果,2304虽然正常,但是23042048=4718592,和我想要达到大于500w还是有一定的差距.
如果用c++开发,能不能提供c++的例程或者是相关SDK? -
RE: SC535M设置默认相机参数画面显示不正常的问题
@veye_xumm
在测量过程中,还存在一个问题,即设置了v4l2-ctl的这些参数后 只有第一路/dev/video0 是不正常的,其他路都是正常的,开始怀疑是摄像头的问题,但是发现对调后仍然是/dev/video0 显示不正常,看起来就像是参数设置没有生效一样 但实际用opencv的show_grey.py例程 /dev/video0是显示正常的 是这些参数有什么先后顺序的问题吗?我也调整过参数的设置顺序,但还是会出现问题 -
RE: SC535M设置默认相机参数画面显示不正常的问题
@veye_xumm 我猜,应该是 opencv它获取了sensor的最大宽度,你不能设置比它传感器更大的宽度,因为2448是可以设置的,但是显示不正常,我把width设置成2304,也是可以的
-
RE: SC535M设置默认相机参数画面显示不正常的问题
jetson-tx2@ubuntu:/usr/local/src/nvidia_jetson_veye_bsp/samples/opencv/raw_camera$ cat 5wb-cam.py import cv2 import argparse import subprocess def main(): # Set up command-line argument parser parser = argparse.ArgumentParser(description='Real-time display of GREY image from /dev/video0') parser.add_argument('--roix', type=int, default=0, help='roi start x (default: 0)') parser.add_argument('--roiy', type=int, default=0, help='roi start y (default: 0)') parser.add_argument('--width', type=int, default=2448, help='image width (default: 1280)') parser.add_argument('--height', type=int, default=2048, help='image height (default: 960)') parser.add_argument('--fps', type=int, default=30, help='frame rate (default: 30)') parser.add_argument('--preferred_stride', type=int, default=2560,help='preferred stride(default: 2560)') args = parser.parse_args() v4l2_cmd = "v4l2-ctl -d /dev/video0 --set-ctrl roi_x=%d" % args.roix subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl -d /dev/video0 --set-ctrl roi_y=%d" % args.roiy subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl -d /dev/video0 --set-fmt-video=width=%d,height=%d,pixelformat=GREY" % (args.width,args.height) subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl -d /dev/video0 --set-ctrl frame_rate=%d" % args.fps subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl --set-ctrl preferred_stride=%d " % args.preferred_stride subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl -d /dev/video1 --set-ctrl roi_x=%d" % args.roix subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl -d /dev/video1 --set-ctrl roi_y=%d" % args.roiy subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl -d /dev/video1 --set-fmt-video=width=%d,height=%d,pixelformat=GREY" % (args.width,args.height) subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl -d /dev/video1 --set-ctrl frame_rate=%d" % args.fps subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl --set-ctrl preferred_stride=%d " % args.preferred_stride subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl -d /dev/video2 --set-ctrl roi_x=%d" % args.roix subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl -d /dev/video2 --set-ctrl roi_y=%d" % args.roiy subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl -d /dev/video2 --set-fmt-video=width=%d,height=%d,pixelformat=GREY" % (args.width,args.height) subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl -d /dev/video2 --set-ctrl frame_rate=%d" % args.fps subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl --set-ctrl preferred_stride=%d " % args.preferred_stride subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl -d /dev/video3 --set-ctrl roi_x=%d" % args.roix subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl -d /dev/video3 --set-ctrl roi_y=%d" % args.roiy subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl -d /dev/video3 --set-fmt-video=width=%d,height=%d,pixelformat=GREY" % (args.width,args.height) subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl -d /dev/video3 --set-ctrl frame_rate=%d" % args.fps subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl --set-ctrl preferred_stride=%d " % args.preferred_stride subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl -d /dev/video4 --set-ctrl roi_x=%d" % args.roix subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl -d /dev/video4 --set-ctrl roi_y=%d" % args.roiy subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl -d /dev/video4 --set-fmt-video=width=%d,height=%d,pixelformat=GREY" % (args.width,args.height) subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl -d /dev/video4 --set-ctrl frame_rate=%d" % args.fps subprocess.call(v4l2_cmd, shell=True) v4l2_cmd = "v4l2-ctl --set-ctrl preferred_stride=%d " % args.preferred_stride subprocess.call(v4l2_cmd, shell=True) # Open the /dev/video0 device cap0 = cv2.VideoCapture('/dev/video0',cv2.CAP_V4L) cap1 = cv2.VideoCapture('/dev/video1',cv2.CAP_V4L) cap2 = cv2.VideoCapture('/dev/video2',cv2.CAP_V4L) cap3 = cv2.VideoCapture('/dev/video3',cv2.CAP_V4L) cap4 = cv2.VideoCapture('/dev/video4',cv2.CAP_V4L) if not cap0.isOpened(): print("Failed to open /dev/video0") return if not cap1.isOpened(): print("Failed to open /dev/video1") return if not cap2.isOpened(): print("Failed to open /dev/video2") return if not cap3.isOpened(): print("Failed to open /dev/video3") return if not cap3.isOpened(): print("Failed to open /dev/video4") return # Set the image size cap0.set(cv2.CAP_PROP_FRAME_WIDTH, 2560) cap0.set(cv2.CAP_PROP_FRAME_HEIGHT, args.height) cap1.set(cv2.CAP_PROP_FRAME_WIDTH, 2560) cap1.set(cv2.CAP_PROP_FRAME_HEIGHT, args.height) cap2.set(cv2.CAP_PROP_FRAME_WIDTH, 2560) cap2.set(cv2.CAP_PROP_FRAME_HEIGHT, args.height) cap3.set(cv2.CAP_PROP_FRAME_WIDTH, 2560) cap3.set(cv2.CAP_PROP_FRAME_HEIGHT, args.height) cap4.set(cv2.CAP_PROP_FRAME_WIDTH, 2560) cap4.set(cv2.CAP_PROP_FRAME_HEIGHT, args.height) # Calculate the aligned width #aligned_width = (args.width + 3)& ~3 # Loop over frames and display them while True: # Read a frame ret0, frame0 = cap0.read() ret1, frame1 = cap1.read() ret2, frame2 = cap2.read() ret3, frame3 = cap3.read() ret4, frame4 = cap4.read() # Check if reading was successful if not ret0: print("Failed to read frame from /dev/video0") break if not ret1: print("Failed to read frame from /dev/video1") break if not ret2: print("Failed to read frame from /dev/video2") break if not ret3: print("Failed to read frame from /dev/video3") break if not ret4: print("Failed to read frame from /dev/video4") break #if frame.shape[1]!= aligned_width: # aligned_frame = np.zeros((args.height, aligned_width), dtype=np.uint8) # aligned_frame[:, args.width] = frame # frame = aligned_frame # Display the frame cv2.imshow('preview (video0)', frame0) cv2.imshow('preview (video1)', frame1) cv2.imshow('preview (video2)', frame2) cv2.imshow('preview (video3)', frame3) cv2.imshow('preview (video4)', frame4) # Exit if 'q' key is pressed if cv2.waitKey(1) & 0xFF == ord('q'): break # Release resources cap0.release() cap1.release() cap2.release() cap3.release() cap4.release() cv2.destroyAllWindows() if __name__ == '__main__': main() jetson-tx2@ubuntu:/usr/local/src/nvidia_jetson_veye_bsp/samples/opencv/raw_camera$ python 5wb-cam.py VIDEOIO ERROR: V4L2: Pixel format of incoming image is unsupported by OpenCV VIDEOIO ERROR: V4L2: Pixel format of incoming image is unsupported by OpenCV VIDEOIO ERROR: V4L2: Pixel format of incoming image is unsupported by OpenCV VIDEOIO ERROR: V4L2: Pixel format of incoming image is unsupported by OpenCV VIDEOIO ERROR: V4L2: Pixel format of incoming image is unsupported by OpenCV VIDIOC_STREAMON: Invalid argument VIDIOC_STREAMON: Invalid argument VIDIOC_STREAMON: Invalid argument VIDIOC_STREAMON: Invalid argument VIDIOC_STREAMON: Invalid argument Failed to read frame from /dev/video0 jetson-tx2@ubuntu:/usr/local/src/nvidia_jetson_veye_bsp/samples/opencv/raw_camera$这样修改之后 opencv就报错了 它不支持2560这样一个比较大的参数
-
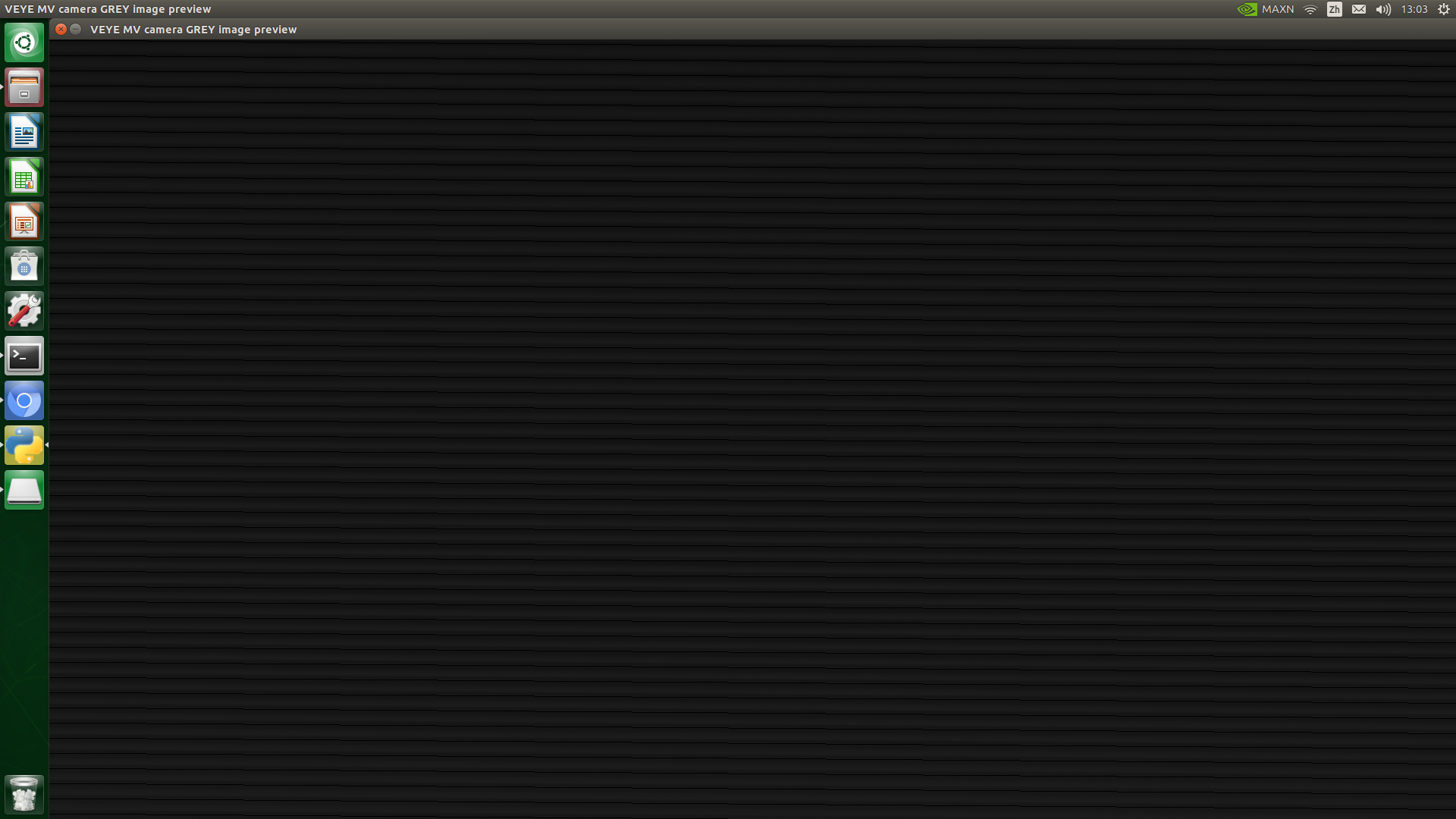
SC535M设置默认相机参数画面显示不正常的问题
5wb-cam .py.txt
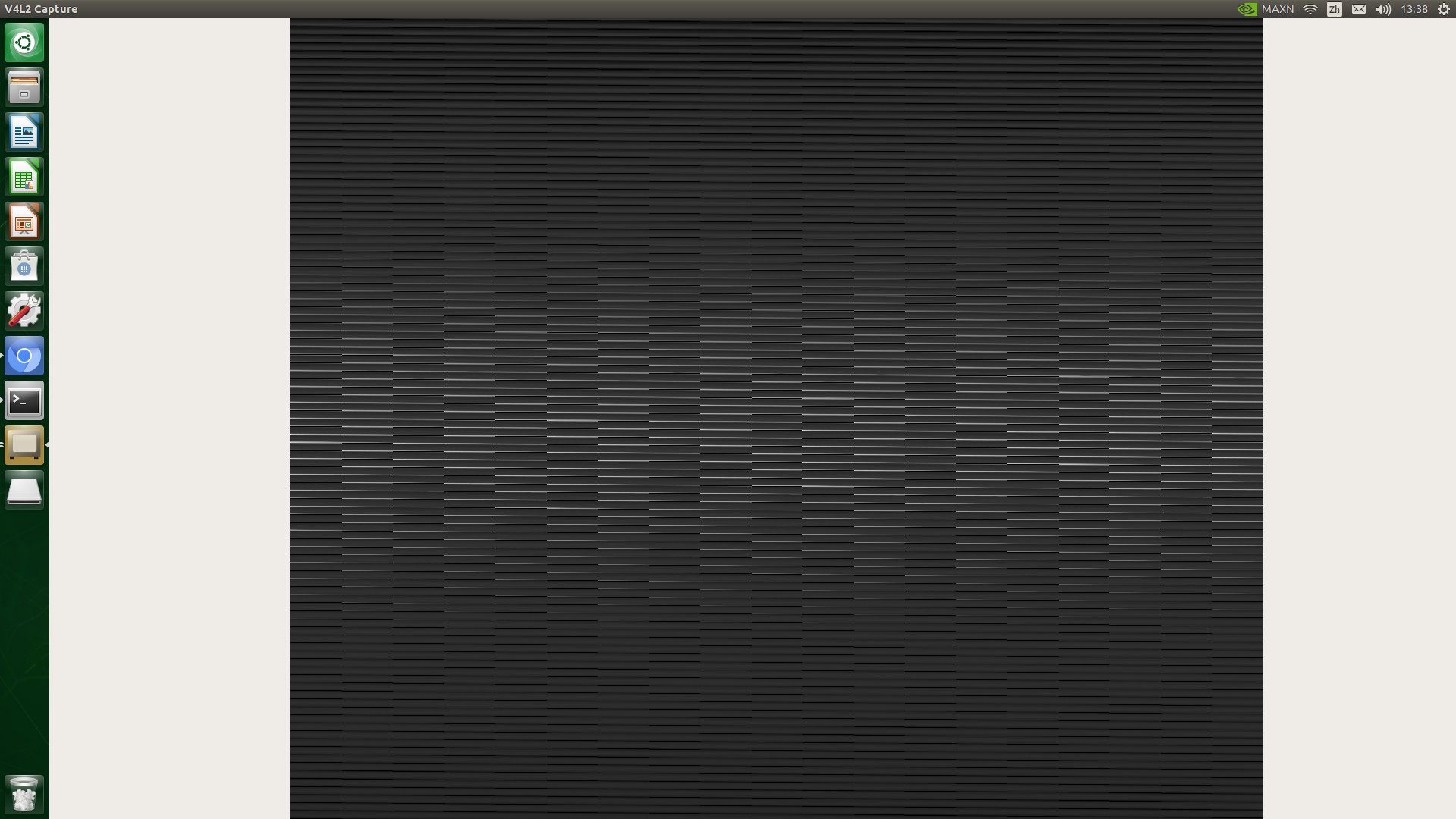
@veye_xumm 你好,这是我根据你们给出的python例程写的一拖五的python例程,其中参数都是按照sensor的实际尺寸来,同时也按照wiki设置了preferred_stride,但是在jetson tx2 预览出的画面不正常 表现为有花纹,我初步判断是内存没对齐的问题,因为jetson需要256位对齐,但我已经设置了preferred_stride,请帮忙看下是什么问题,我写的源码已上传,python版本为3.6.9,opencv版本为4.1.1 -
RE: jetson tx2 + SC535M 一拖五 jetpack 4.6.x的驱动问题
@veye_xumm
现在我已经把我的jetpack刷到了4.6.4

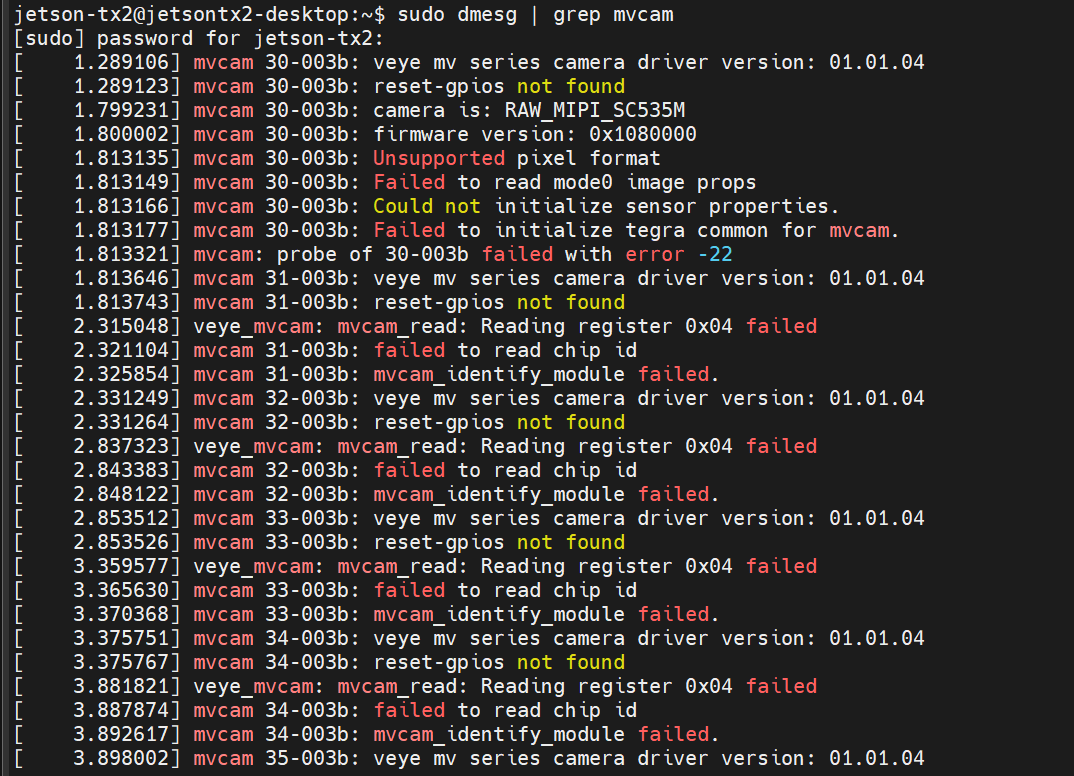
也映射出了video0
但是,dmesg还是一堆报错信息
-
RE: jetson tx2 + SC535M 一拖五 jetpack 4.6.x的驱动问题
@veye_xumm 好的 更新完了 请还按原邮箱发送驱动文件 也请在论坛上告知我
-
RE: jetson tx2 + SC535M 一拖五 jetpack 4.6.x的驱动问题
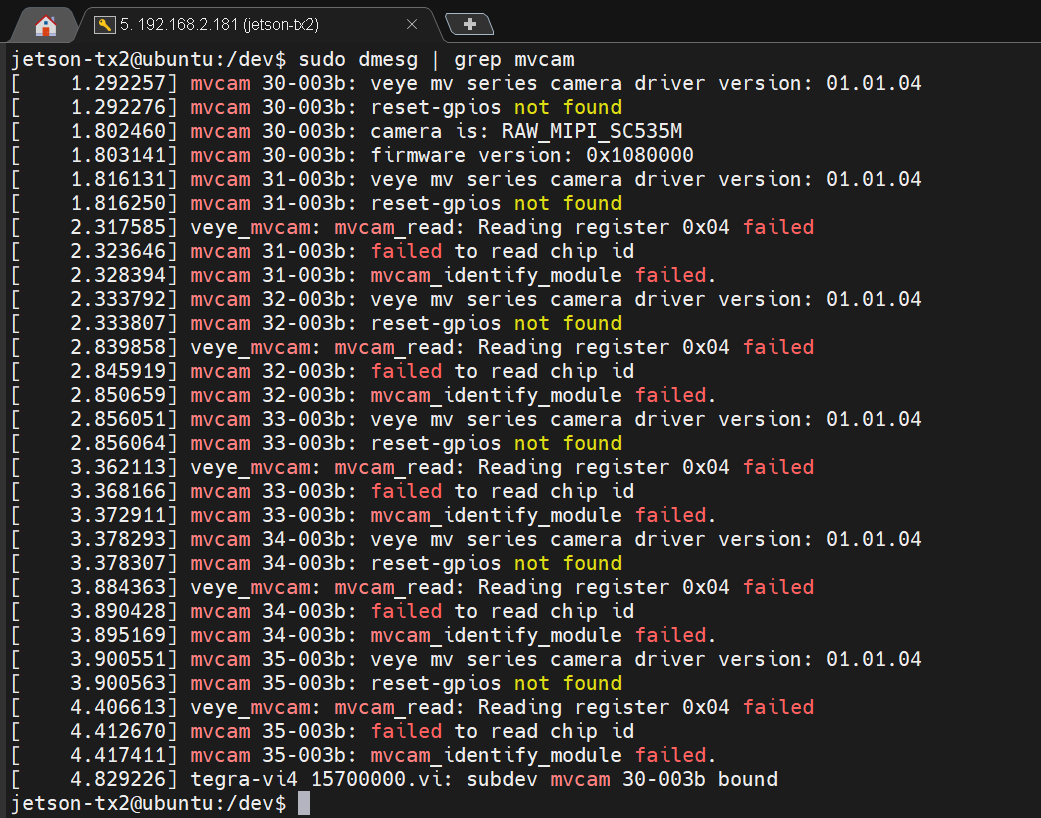
@veye_xumm
我重新编译了image 并断电重启 现在camera id 能够被识别成RAW_MIPI_SC535M,固件版本号也出来了,但是仍有一堆报错信息 -
RE: jetson tx2 + SC535M 一拖五 jetpack 4.6.x的驱动问题
@veye_xumm 已经收到驱动文件,请删除我的私人邮箱相关帖子。
-
RE: jetson tx2 + SC535M 一拖五 jetpack 4.6.x的驱动问题
@veye_xumm
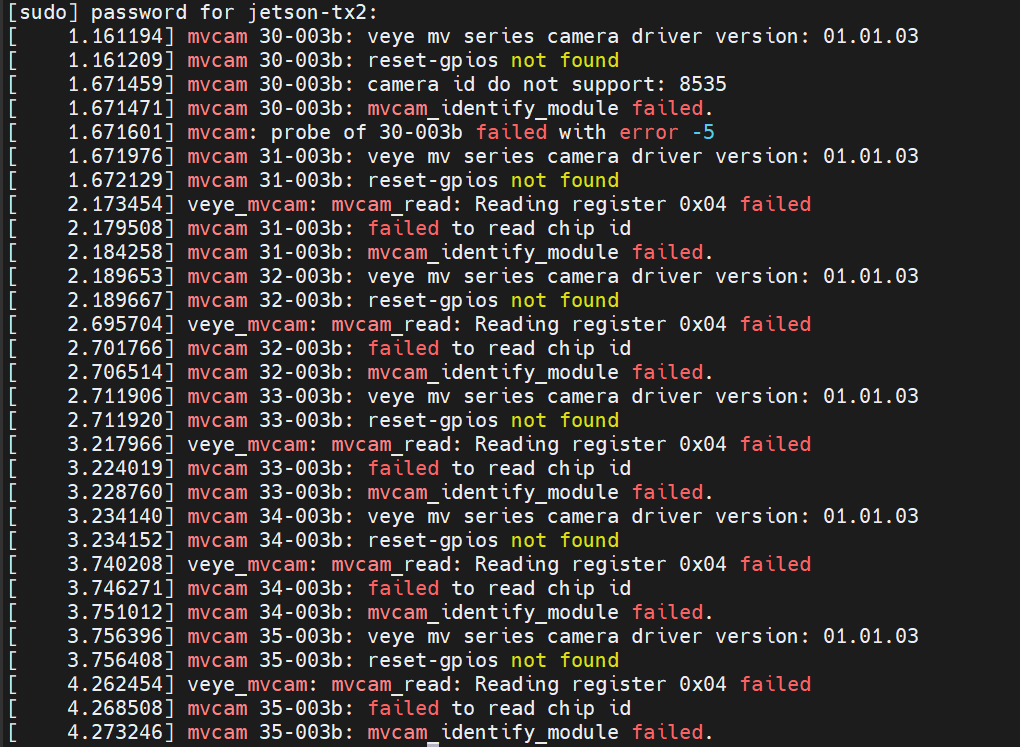
看上去 确实有问题 按照你给的命令后 并没能识别到 -
RE: jetson tx2 + SC535M 一拖五 jetpack 4.6.x的驱动问题
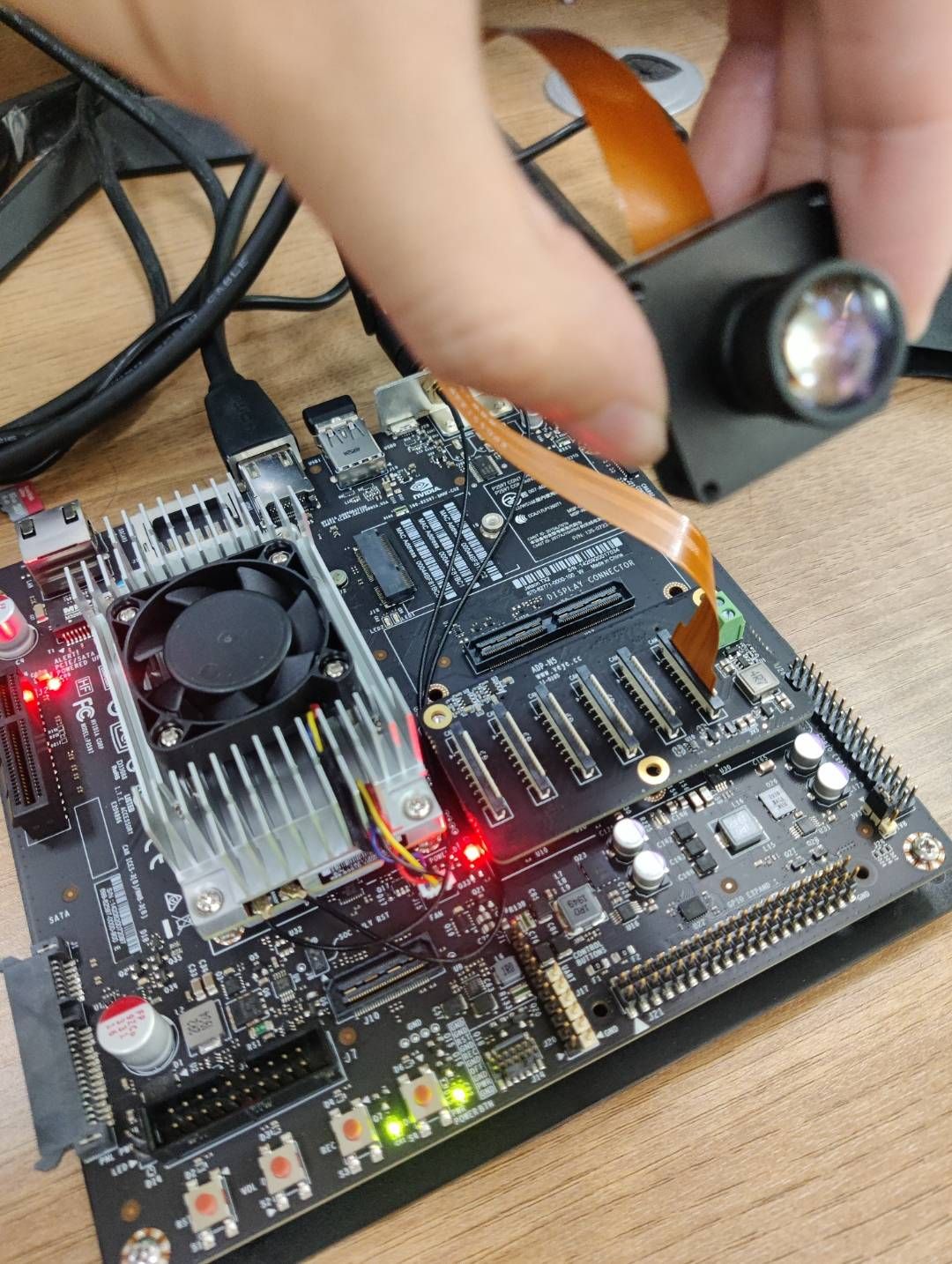
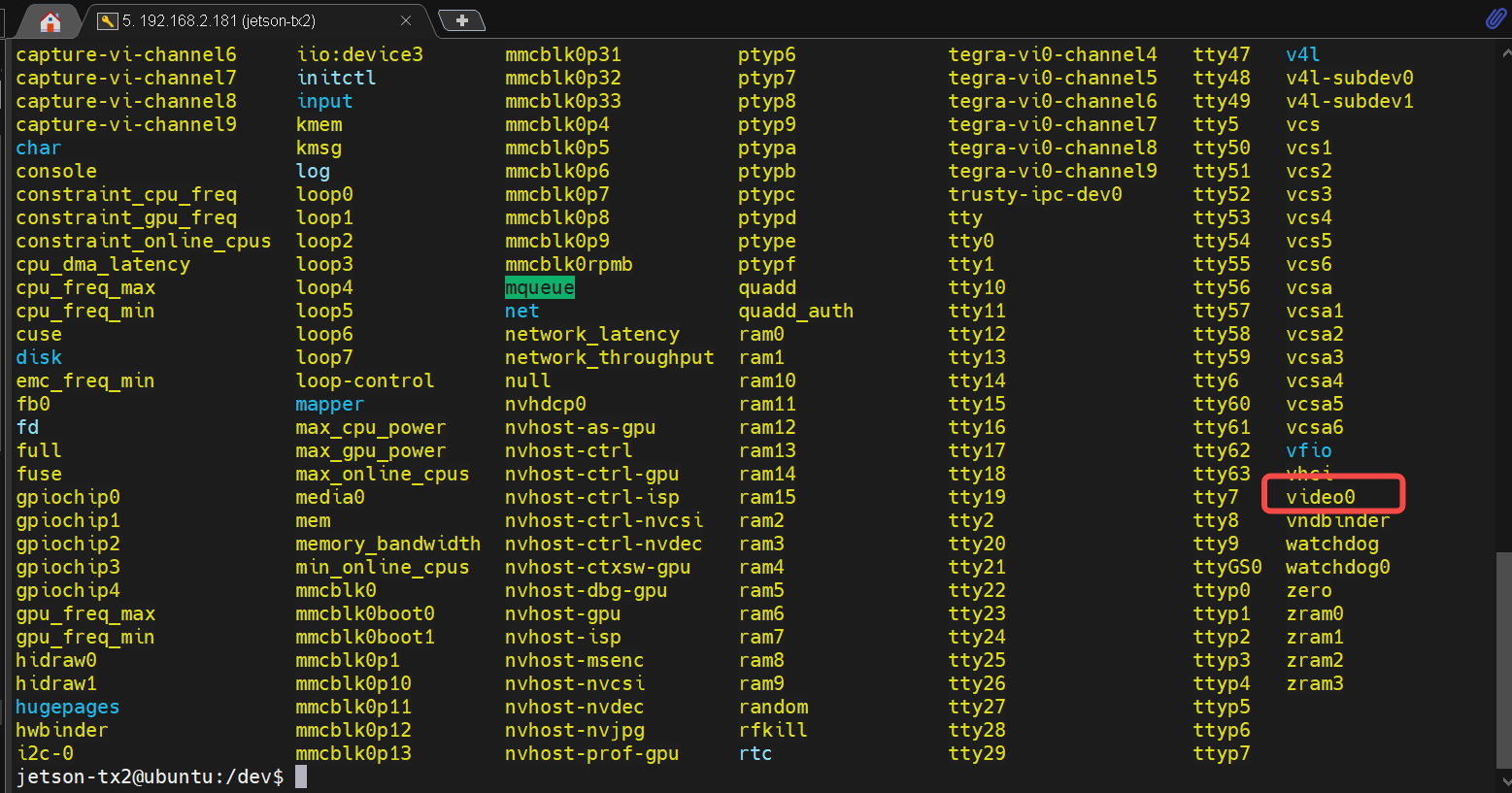
我的硬件接入方式如上图所示
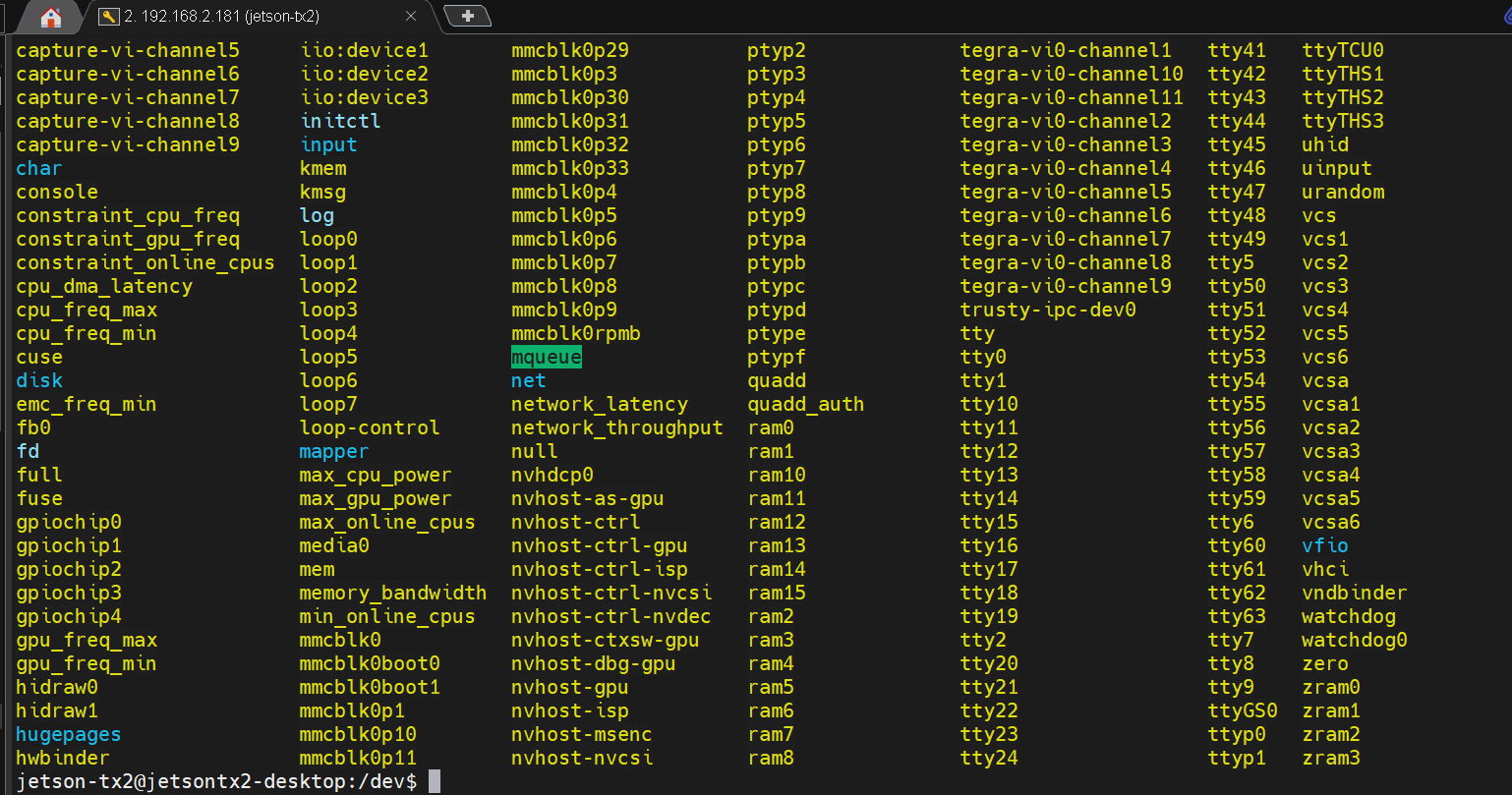
我的dev下设备文件如图所示。
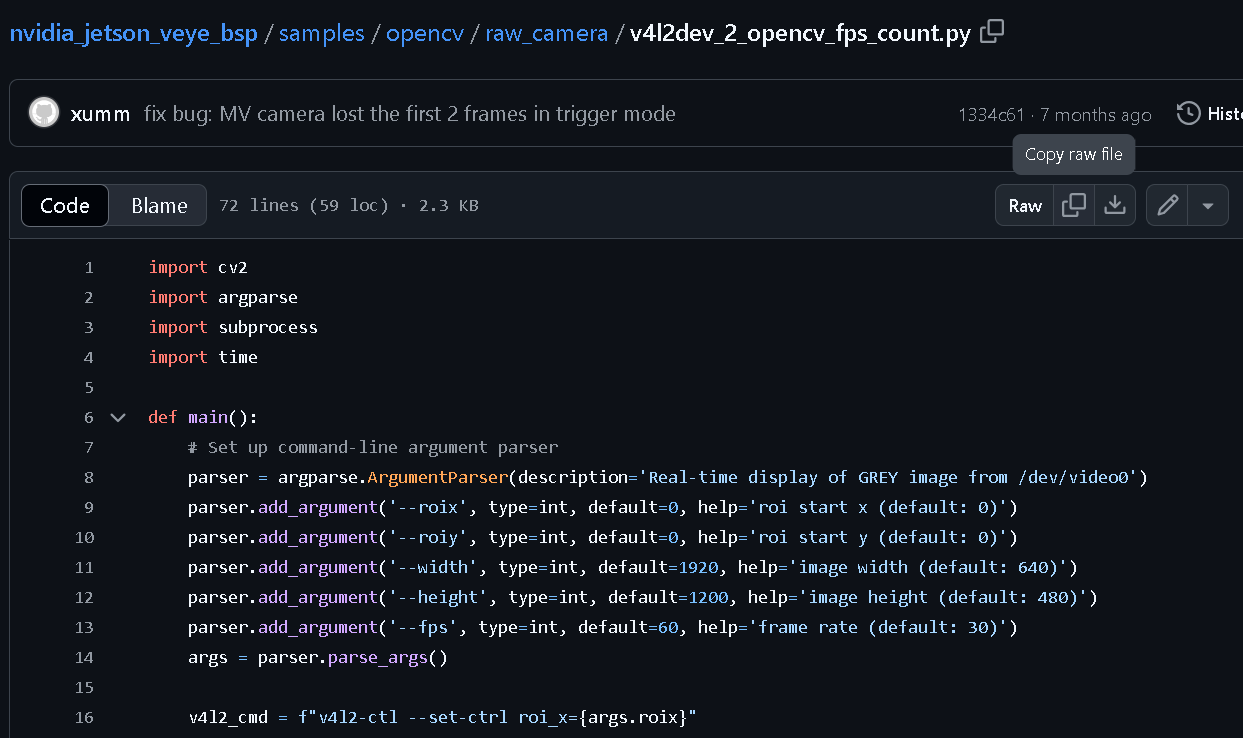
我尝试跑通这个例程