Hello,
i have my own developed carrier board for an Jetson TX2 with an DS90UB964TRGCTQ1 chip. What do i have to do to make the IMX307 cameras with FPD-LINK3-TX run?
kind regards
Hello,
i have my own developed carrier board for an Jetson TX2 with an DS90UB964TRGCTQ1 chip. What do i have to do to make the IMX307 cameras with FPD-LINK3-TX run?
kind regards
@veye_xumm Does veye still have such a system in stock? I would like to order a set again. or will the system be available again this year
@veye_xumm ok i am understand, just these three formats
thank you
@veye_xumm is it possible to set other video formats? for example when i change the devicetree?
regards
Hello,
how to use the Sensor crop mode of the IMX307 Camera.
Thanks a lot
@veye_xumm
i have installed the new version. it looks good for now. One question do i need to set the fpdlink-settings after each reboot?
@veye_xumm sorry i forgot to upload the blue image

@veye_xumm
A lens is connected on all camera. If i switch back the configuration to "free run" on each camera, all images look normal.
@veye_xumm
No special lens on the cameras - just the standard from veye
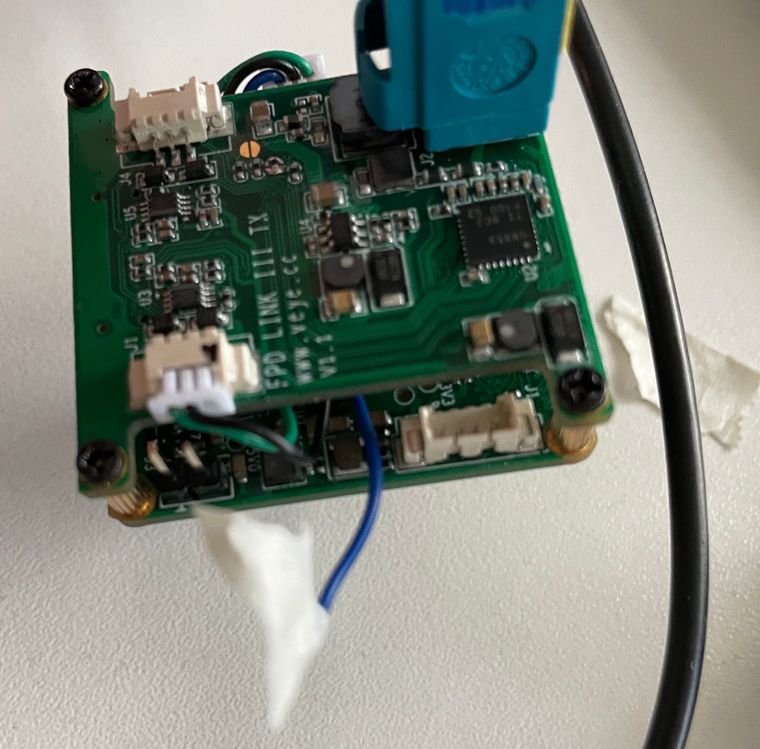
Here is an image

@veye_xumm
Hi here is my drawing:
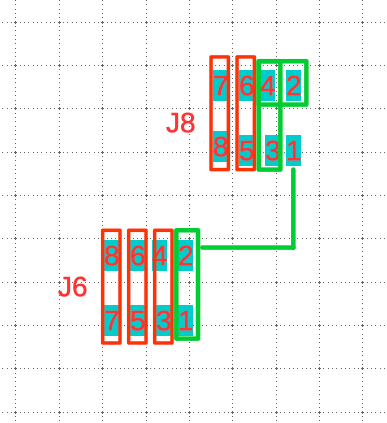
Red: the jumpers
Green: the two black delivered wires
Following cameras showing this kind of image:
Camera 1 /dev/video0 image ok
Camera 2 /dev/video1 blue image
Camera 3 /dev/video2 purple image
Camera 4 /dev/video3 image ok
Camera 5 /dev/video4 purple image
Camera 6 /dev/video5 blue image
Camera 7 /dev/video6 purple image
Camera 8 /dev/video7 blue image
@veye_xumm Hi Xumm,
I use this script to set sync_mode and master slave config:
#!/bin/bash
SYNC_INIT="sync_init"
STREAM_MODE="streammode"
echo -e "connected cameras:"
ls -l /dev/video*
echo -e "Set camera 0_1 to Master"
sh ./fpdlink3_i2c_jetson.sh -f $SYNC_INIT -p 0 -p1 0 -b 30
sh ./cs_mipi_i2c.sh -w -f $STREAM_MODE -p1 1 -p2 0 -b 30 -d 0x3b
echo -e "Set camera 0_2 to slave"
sh ./fpdlink3_i2c_jetson.sh -f $SYNC_INIT -p 1 -p1 1 -b 30
sh ./cs_mipi_i2c.sh -w -f $STREAM_MODE -p1 1 -p2 1 -b 30 -d 0x3c
echo -e "Set camera 1_1 to slave"
sh ./fpdlink3_i2c_jetson.sh -f $SYNC_INIT -p 0 -p1 1 -b 31
sh ./cs_mipi_i2c.sh -w -f $STREAM_MODE -p1 1 -p2 1 -b 31 -d 0x3b
echo -e "Set camera 1_2 to slave"
sh ./fpdlink3_i2c_jetson.sh -f $SYNC_INIT -p 1 -p1 1 -b 31
sh ./cs_mipi_i2c.sh -w -f $STREAM_MODE -p1 1 -p2 1 -b 31 -d 0x3c
echo -e "Set camera 2_1 to slave"
sh ./fpdlink3_i2c_jetson.sh -f $SYNC_INIT -p 0 -p1 1 -b 32
sh ./cs_mipi_i2c.sh -w -f $STREAM_MODE -p1 1 -p2 1 -b 32 -d 0x3b
echo -e "Set camera 2_2 to slave"
sh ./fpdlink3_i2c_jetson.sh -f $SYNC_INIT -p 1 -p1 1 -b 32
sh ./cs_mipi_i2c.sh -w -f $STREAM_MODE -p1 1 -p2 1 -b 32 -d 0x3c
echo -e "Set camera 3_1 to slave"
sh ./fpdlink3_i2c_jetson.sh -f $SYNC_INIT -p 0 -p1 1 -b 33
sh ./cs_mipi_i2c.sh -w -f $STREAM_MODE -p1 1 -p2 1 -b 33 -d 0x3b
echo -e "Set camera 3_2 to slave"
sh ./fpdlink3_i2c_jetson.sh -f $SYNC_INIT -p 1 -p1 1 -b 33
sh ./cs_mipi_i2c.sh -w -f $STREAM_MODE -p1 1 -p2 1 -b 33 -d 0x3c
This is the result:
====== Configure master/slave syncmode ======
connected cameras:
crw-rw----+ 1 root video 81, 0 Mär 29 16:25 /dev/video0
crw-rw----+ 1 root video 81, 3 Mär 29 16:25 /dev/video1
crw-rw----+ 1 root video 81, 6 Mär 29 16:25 /dev/video2
crw-rw----+ 1 root video 81, 9 Mär 29 16:25 /dev/video3
crw-rw----+ 1 root video 81, 12 Mär 29 16:25 /dev/video4
crw-rw----+ 1 root video 81, 15 Mär 29 16:25 /dev/video5
crw-rw----+ 1 root video 81, 18 Mär 29 16:25 /dev/video6
crw-rw----+ 1 root video 81, 21 Mär 29 16:25 /dev/video7
Set camera 0_1 to Master
usage: p1, role,0 is master,1 is slave
init fpdlink sync mode port 0 role as MASTER!
w stream mode master
w streammode 0x 1 slave mode 0x 0 and save param
w paramsave,all param will write to flash
Set camera 0_2 to slave
usage: p1, role,0 is master,1 is slave
init fpdlink sync mode port 1 role as SLAVE!
w stream mode slave
w streammode 0x 1 slave mode 0x 1 and save param
w paramsave,all param will write to flash
Set camera 1_1 to slave
usage: p1, role,0 is master,1 is slave
init fpdlink sync mode port 0 role as SLAVE!
w stream mode slave
w streammode 0x 1 slave mode 0x 1 and save param
w paramsave,all param will write to flash
Set camera 1_2 to slave
usage: p1, role,0 is master,1 is slave
init fpdlink sync mode port 1 role as SLAVE!
w stream mode slave
w streammode 0x 1 slave mode 0x 1 and save param
w paramsave,all param will write to flash
Set camera 2_1 to slave
usage: p1, role,0 is master,1 is slave
init fpdlink sync mode port 0 role as SLAVE!
w stream mode slave
w streammode 0x 1 slave mode 0x 1 and save param
w paramsave,all param will write to flash
Set camera 2_2 to slave
usage: p1, role,0 is master,1 is slave
init fpdlink sync mode port 1 role as SLAVE!
w stream mode slave
w streammode 0x 1 slave mode 0x 1 and save param
w paramsave,all param will write to flash
Set camera 3_1 to slave
usage: p1, role,0 is master,1 is slave
init fpdlink sync mode port 0 role as SLAVE!
w stream mode slave
w streammode 0x 1 slave mode 0x 1 and save param
w paramsave,all param will write to flash
Set camera 3_2 to slave
usage: p1, role,0 is master,1 is slave
init fpdlink sync mode port 1 role as SLAVE!
w stream mode slave
w streammode 0x 1 slave mode 0x 1 and save param
w paramsave,all param will write to flash
Looks good for me.
If i ask the i2c bus which mode is configured, i get this:
Camera 0_1
r streammode 0x 1 slave mode is 0
Camera 0_2
r streammode 0x 1 slave mode is 1
Camera 1_1
r streammode 0x 1 slave mode is 1
Camera 1_2
r streammode 0x 1 slave mode is 1
Camera 2_1
r streammode 0x 1 slave mode is 1
Camera 2_2
r streammode 0x 1 slave mode is 1
Camera 3_1
r streammode 0x 1 slave mode is 1
Camera 3_2
r streammode 0x 1 slave mode is 1
To grab images i use my v4l2-ctl script:
#!/bin/bash
cameras=7
counter=0
while [ $counter -le $cameras ]
do
echo -e "Camera_"$counter
v4l2-ctl --device /dev/video$counter --stream-mmap --stream-to=frame_$counter.raw --stream-count=1
convert -size 1920x1080 -depth 16 uyvy:frame_$counter.raw frame_$counter.png
((counter++))
done
Camera 1 images looks good.
some cameras a purple some are blue!

Do you need more informations? Or do you have any ideas whats wrong?
@veye_xumm
It just work with two cameras but not with 8.
Any other ideas whats wrong ?
@veye_xumm
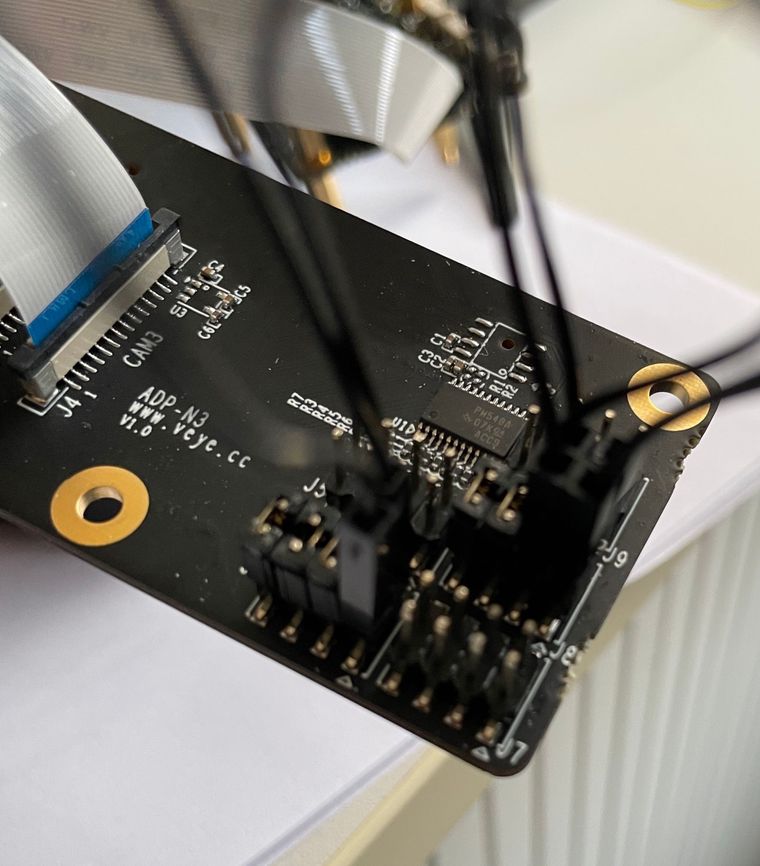
SYNC signal connect:
J7-3 (GPIO0) to J1-3 (GPIO0),
J7-2 (GND) to J1-2 (GND)
Do i need to do the wireing on each camera? or just master camera.
Any other wiring to do?
@veye_xumm I still have blue Images.

Wire configuration standard.
Changed as reference in http://forum.veye.cc/topic/22/i-want-to-synchronize-the-two-cameras-in-sync-mode/6?_=1616485571342
Can you please check what i am doing wrong or post a detailed photo of the right configuration.
Thank you
I think it's worked now, i have made an Firmware update of each camera. What is the best way to check synchronization?
Hi, i use the Jetson platform. So its not possible right?
Hi,
does the camera (IMX307) and FPDLinkIII-TX/RX boards support hotplug mode?
e.g my post here:
http://forum.veye.cc/topic/21/camera-i2c-configuaration-for-sync-mode
I just have blue images like the post here:
http://forum.veye.cc/topic/22/i-want-to-synchronize-the-two-cameras-in-sync-mode
But i have 8 cameras connected.
Do I also connect the boards: FPD-LINK3-2RX?
or is it the i2c configuration?
Hi,
do i need special i2c configuaration for camera syncmode ? I have configured:
Master
./fpdlink3_i2c.sh -f sync_init -p 0 -p1 0 -b 30
./cs_mipi_i2c.sh -w -f streammode -p1 1 -p2 0 -b 30 -d 0x3b
Slaves
./fpdlink3_i2c_jetson.sh -f sync_init -p 1 -p1 1 -b 30
./cs_mipi_i2c.sh -w -f streammode -p1 1 -p2 1 -b 30 -d 0x3c
./fpdlink3_i2c_jetson.sh -f sync_init -p 0 -p1 1 -b 31
./cs_mipi_i2c.sh -w -f streammode -p1 1 -p2 1 -b 31 -d 0x3b
./fpdlink3_i2c_jetson.sh -f sync_init -p 1 -p1 1 -b 31
./cs_mipi_i2c.sh -w -f streammode -p1 1 -p2 1 -b 31 -d 0x3c
./fpdlink3_i2c_jetson.sh -f sync_init -p 0 -p1 1 -b 32
./cs_mipi_i2c.sh -w -f streammode -p1 1 -p2 1 -b 32 -d 0x3b
./fpdlink3_i2c_jetson.sh -f sync_init -p 1 -p1 1 -b 32
./cs_mipi_i2c.sh -w -f streammode -p1 1 -p2 1 -b 32 -d 0x3c
./fpdlink3_i2c_jetson.sh -f sync_init -p 0 -p1 1 -b 33
./cs_mipi_i2c.sh -w -f streammode -p1 1 -p2 1 -b 33 -d 0x3b
./fpdlink3_i2c_jetson.sh -f sync_init -p 1 -p1 1 -b 33
./cs_mipi_i2c.sh -w -f streammode -p1 1 -p2 1 -b 33 -d 0x3c
Do i need more i2c configurations?
My problem is, camera 1 (/dev/video0) works fine but the slave (/dev/video1-7) have just blue image
regards