SOLVED Camera sync mode
-
I have an CS-FPD-XAVIER-nCAM-IMX307 with 8 camera system - it works perfect!
Now I want install the sync mode. In your manual its described as:SYNC signal connection: The synchronization signal is connected as shown in the figure above. J5 needs to be connected with J7's 2, 4, 6 and 8pin, and J6 is connected with J8's 2, 4, 6 and 8pin. For the schematic diagram of the SYNC signal, please refer to: · FPD-LINK3-2RX Datasheet · ADP-N2 Datasheet · ADP-N3 DatasheetBut i dont know exactly what to do.
Can you describe it an in other way. Or do you have an photo of the wiring on the APD-N3 Board? -
@g-towboat
Hi,Accroding to the version log,http://wiki.veye.cc/index.php/CS-MIPI-IMX307_version_log,
CS-MIPI-IMX307_FV2.33_LV3.3_20201106.bin
Optimize the sync mechanism by using only frame synchronization signals.
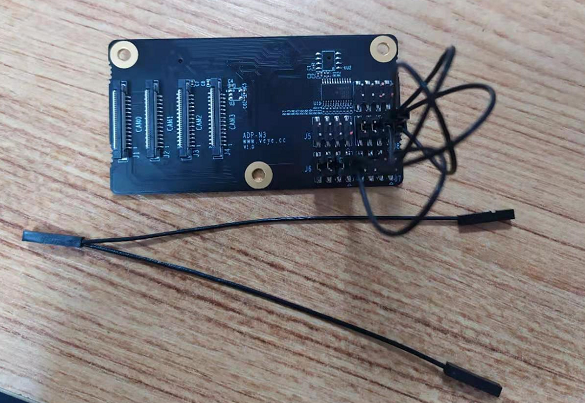
Fpdlink mode synchronization is supported.So the J5 to J8 connection is not necessary anymore. You just need to connect J6 and J8 together, as shown below.
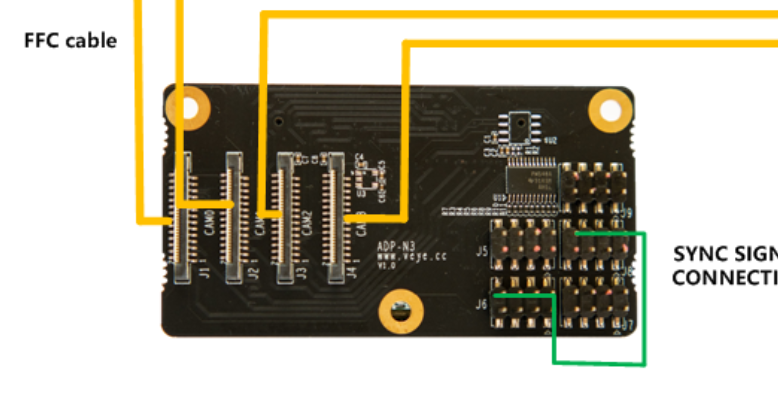
Please notice the pin1、3、5、7 of J6 and J8 are connected together separately, please use them flexibly.
-
@veye_xumm
Thanks for your answer.Did I understand that correctly. The connections should look like this:
One wire from - to
J6 pin 2 - J8 pin 2
J6 pin 2 - J8 pin 2
J6 pin 4 - J8 pin 4
J6 pin 6 - J8 pin 6 -
@g-towboat said in Camera sync mode:
@veye_xumm
Thanks for your answer.Did I understand that correctly. The connections should look like this:
One wire from - to
J6 pin 2 - J8 pin 2
J6 pin 4 - J8 pin 4
J6 pin 6 - J8 pin 6I think you just need to connect 2 4 6 8 pins of J6 and J8 together.
And all 1 2 3 4 5 6 7 8 pins of J6 and J8 together will work too. -
@veye_xumm
i'm sorry, but i still haven't got it. Can you describe it in a table e.g.:
J6 Pin X - J8 Pin YThank you
-
It's not some pairs of connection. It's a group of connection.
For example:
J6-2 is the source of XVS, and J6-4 J6-6 J6-8 J8-2 J8-4 J8-6 J8-8 are all sink of XVS.
So what you need to do is connect all these pins together.J6-1 J6-3 J6-5 J6-7 are already connected together on the board.
J8-1 J8-3 J8-5 J8-7 are already connected together on the board.
You can use them if you want.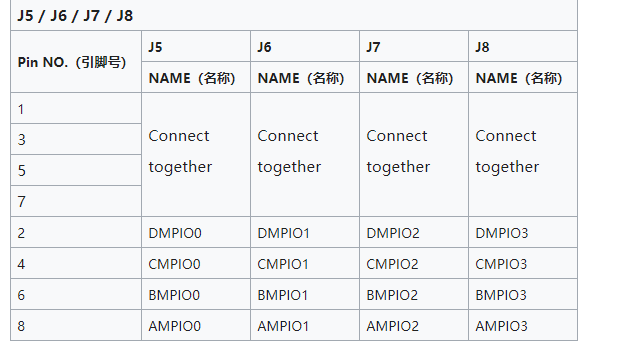
-
This post is deleted! -
e.g my post here:
http://forum.veye.cc/topic/21/camera-i2c-configuaration-for-sync-modeI just have blue images like the post here:
http://forum.veye.cc/topic/22/i-want-to-synchronize-the-two-cameras-in-sync-mode
But i have 8 cameras connected.Do I also connect the boards: FPD-LINK3-2RX?
or is it the i2c configuration? -
@g-towboat
Since you use CS-FPD-XAVIER-nCAM-IMX307, FPD-LINK3-2RX is a part of this module. -
@g-towboat
You can post your hardware connection here, I'll check it for you. -
I think it's worked now, i have made an Firmware update of each camera. What is the best way to check synchronization?
-
-
@veye_xumm I still have blue Images.

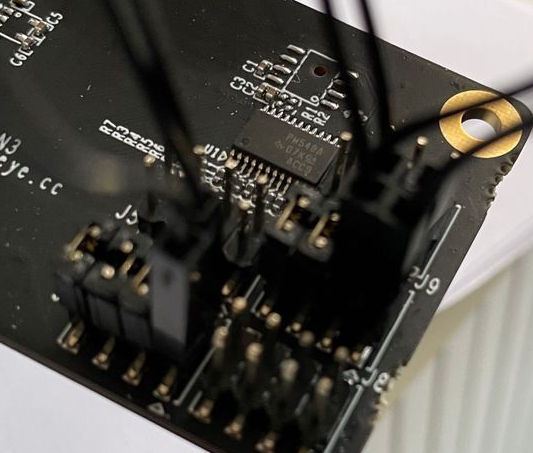
Wire configuration standard.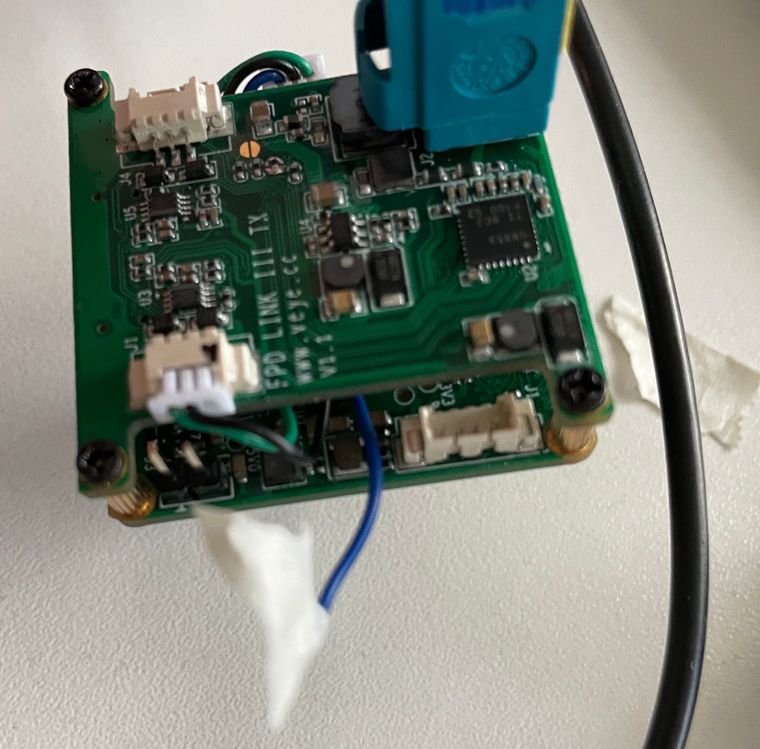
Changed as reference in http://forum.veye.cc/topic/22/i-want-to-synchronize-the-two-cameras-in-sync-mode/6?_=1616485571342
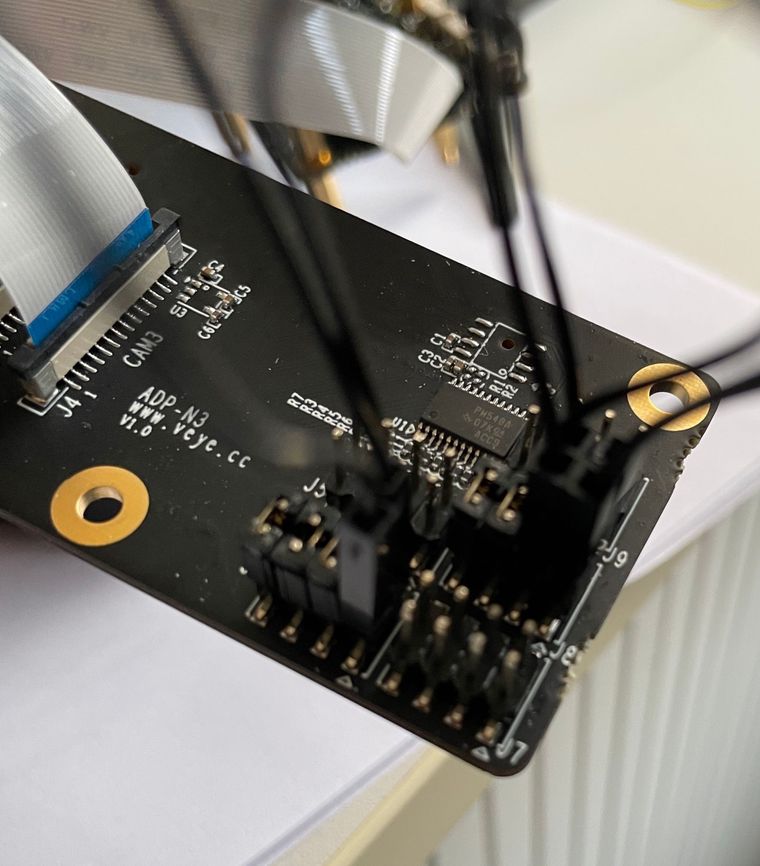
Can you please check what i am doing wrong or post a detailed photo of the right configuration.
Thank you -
@g-towboat

I think you pick out the wrong wire. -
@veye_xumm
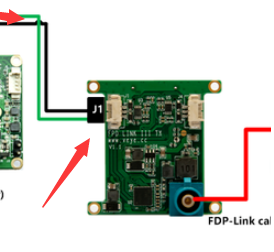
SYNC signal connect:
J7-3 (GPIO0) to J1-3 (GPIO0),
J7-2 (GND) to J1-2 (GND)Do i need to do the wireing on each camera? or just master camera.
Any other wiring to do? -
@g-towboat said in Camera sync mode:
@veye_xumm
SYNC signal connect:
J7-3 (GPIO0) to J1-3 (GPIO0),
J7-2 (GND) to J1-2 (GND)Do i need to do the wireing on each camera? or just master camera.
everyone
Any other wiring to do?
no
-
@veye_xumm
It just work with two cameras but not with 8.
Any other ideas whats wrong ? -
@g-towboat
pls check you setting following :http://wiki.veye.cc/index.php/FPD_LINK_III_for_Jetson -
@veye_xumm Hi Xumm,
I use this script to set sync_mode and master slave config:
#!/bin/bash SYNC_INIT="sync_init" STREAM_MODE="streammode" echo -e "connected cameras:" ls -l /dev/video* echo -e "Set camera 0_1 to Master" sh ./fpdlink3_i2c_jetson.sh -f $SYNC_INIT -p 0 -p1 0 -b 30 sh ./cs_mipi_i2c.sh -w -f $STREAM_MODE -p1 1 -p2 0 -b 30 -d 0x3b echo -e "Set camera 0_2 to slave" sh ./fpdlink3_i2c_jetson.sh -f $SYNC_INIT -p 1 -p1 1 -b 30 sh ./cs_mipi_i2c.sh -w -f $STREAM_MODE -p1 1 -p2 1 -b 30 -d 0x3c echo -e "Set camera 1_1 to slave" sh ./fpdlink3_i2c_jetson.sh -f $SYNC_INIT -p 0 -p1 1 -b 31 sh ./cs_mipi_i2c.sh -w -f $STREAM_MODE -p1 1 -p2 1 -b 31 -d 0x3b echo -e "Set camera 1_2 to slave" sh ./fpdlink3_i2c_jetson.sh -f $SYNC_INIT -p 1 -p1 1 -b 31 sh ./cs_mipi_i2c.sh -w -f $STREAM_MODE -p1 1 -p2 1 -b 31 -d 0x3c echo -e "Set camera 2_1 to slave" sh ./fpdlink3_i2c_jetson.sh -f $SYNC_INIT -p 0 -p1 1 -b 32 sh ./cs_mipi_i2c.sh -w -f $STREAM_MODE -p1 1 -p2 1 -b 32 -d 0x3b echo -e "Set camera 2_2 to slave" sh ./fpdlink3_i2c_jetson.sh -f $SYNC_INIT -p 1 -p1 1 -b 32 sh ./cs_mipi_i2c.sh -w -f $STREAM_MODE -p1 1 -p2 1 -b 32 -d 0x3c echo -e "Set camera 3_1 to slave" sh ./fpdlink3_i2c_jetson.sh -f $SYNC_INIT -p 0 -p1 1 -b 33 sh ./cs_mipi_i2c.sh -w -f $STREAM_MODE -p1 1 -p2 1 -b 33 -d 0x3b echo -e "Set camera 3_2 to slave" sh ./fpdlink3_i2c_jetson.sh -f $SYNC_INIT -p 1 -p1 1 -b 33 sh ./cs_mipi_i2c.sh -w -f $STREAM_MODE -p1 1 -p2 1 -b 33 -d 0x3cThis is the result:
====== Configure master/slave syncmode ====== connected cameras: crw-rw----+ 1 root video 81, 0 Mär 29 16:25 /dev/video0 crw-rw----+ 1 root video 81, 3 Mär 29 16:25 /dev/video1 crw-rw----+ 1 root video 81, 6 Mär 29 16:25 /dev/video2 crw-rw----+ 1 root video 81, 9 Mär 29 16:25 /dev/video3 crw-rw----+ 1 root video 81, 12 Mär 29 16:25 /dev/video4 crw-rw----+ 1 root video 81, 15 Mär 29 16:25 /dev/video5 crw-rw----+ 1 root video 81, 18 Mär 29 16:25 /dev/video6 crw-rw----+ 1 root video 81, 21 Mär 29 16:25 /dev/video7 Set camera 0_1 to Master usage: p1, role,0 is master,1 is slave init fpdlink sync mode port 0 role as MASTER! w stream mode master w streammode 0x 1 slave mode 0x 0 and save param w paramsave,all param will write to flash Set camera 0_2 to slave usage: p1, role,0 is master,1 is slave init fpdlink sync mode port 1 role as SLAVE! w stream mode slave w streammode 0x 1 slave mode 0x 1 and save param w paramsave,all param will write to flash Set camera 1_1 to slave usage: p1, role,0 is master,1 is slave init fpdlink sync mode port 0 role as SLAVE! w stream mode slave w streammode 0x 1 slave mode 0x 1 and save param w paramsave,all param will write to flash Set camera 1_2 to slave usage: p1, role,0 is master,1 is slave init fpdlink sync mode port 1 role as SLAVE! w stream mode slave w streammode 0x 1 slave mode 0x 1 and save param w paramsave,all param will write to flash Set camera 2_1 to slave usage: p1, role,0 is master,1 is slave init fpdlink sync mode port 0 role as SLAVE! w stream mode slave w streammode 0x 1 slave mode 0x 1 and save param w paramsave,all param will write to flash Set camera 2_2 to slave usage: p1, role,0 is master,1 is slave init fpdlink sync mode port 1 role as SLAVE! w stream mode slave w streammode 0x 1 slave mode 0x 1 and save param w paramsave,all param will write to flash Set camera 3_1 to slave usage: p1, role,0 is master,1 is slave init fpdlink sync mode port 0 role as SLAVE! w stream mode slave w streammode 0x 1 slave mode 0x 1 and save param w paramsave,all param will write to flash Set camera 3_2 to slave usage: p1, role,0 is master,1 is slave init fpdlink sync mode port 1 role as SLAVE! w stream mode slave w streammode 0x 1 slave mode 0x 1 and save param w paramsave,all param will write to flashLooks good for me.
If i ask the i2c bus which mode is configured, i get this:
Camera 0_1 r streammode 0x 1 slave mode is 0 Camera 0_2 r streammode 0x 1 slave mode is 1 Camera 1_1 r streammode 0x 1 slave mode is 1 Camera 1_2 r streammode 0x 1 slave mode is 1 Camera 2_1 r streammode 0x 1 slave mode is 1 Camera 2_2 r streammode 0x 1 slave mode is 1 Camera 3_1 r streammode 0x 1 slave mode is 1 Camera 3_2 r streammode 0x 1 slave mode is 1To grab images i use my v4l2-ctl script:
#!/bin/bash cameras=7 counter=0 while [ $counter -le $cameras ] do echo -e "Camera_"$counter v4l2-ctl --device /dev/video$counter --stream-mmap --stream-to=frame_$counter.raw --stream-count=1 convert -size 1920x1080 -depth 16 uyvy:frame_$counter.raw frame_$counter.png ((counter++)) doneCamera 1 images looks good.
some cameras a purple some are blue!
Do you need more informations? Or do you have any ideas whats wrong?
-
@g-towboat said in Camera sync mode:
some cameras a purple some are blue!

Do you need more informations? Or do you have any ideas whats wrong?which one is purple,which one is blue?
I think the script is good. It might be wire connection problem.
Could you draw a sketch of this part? let me have a look.