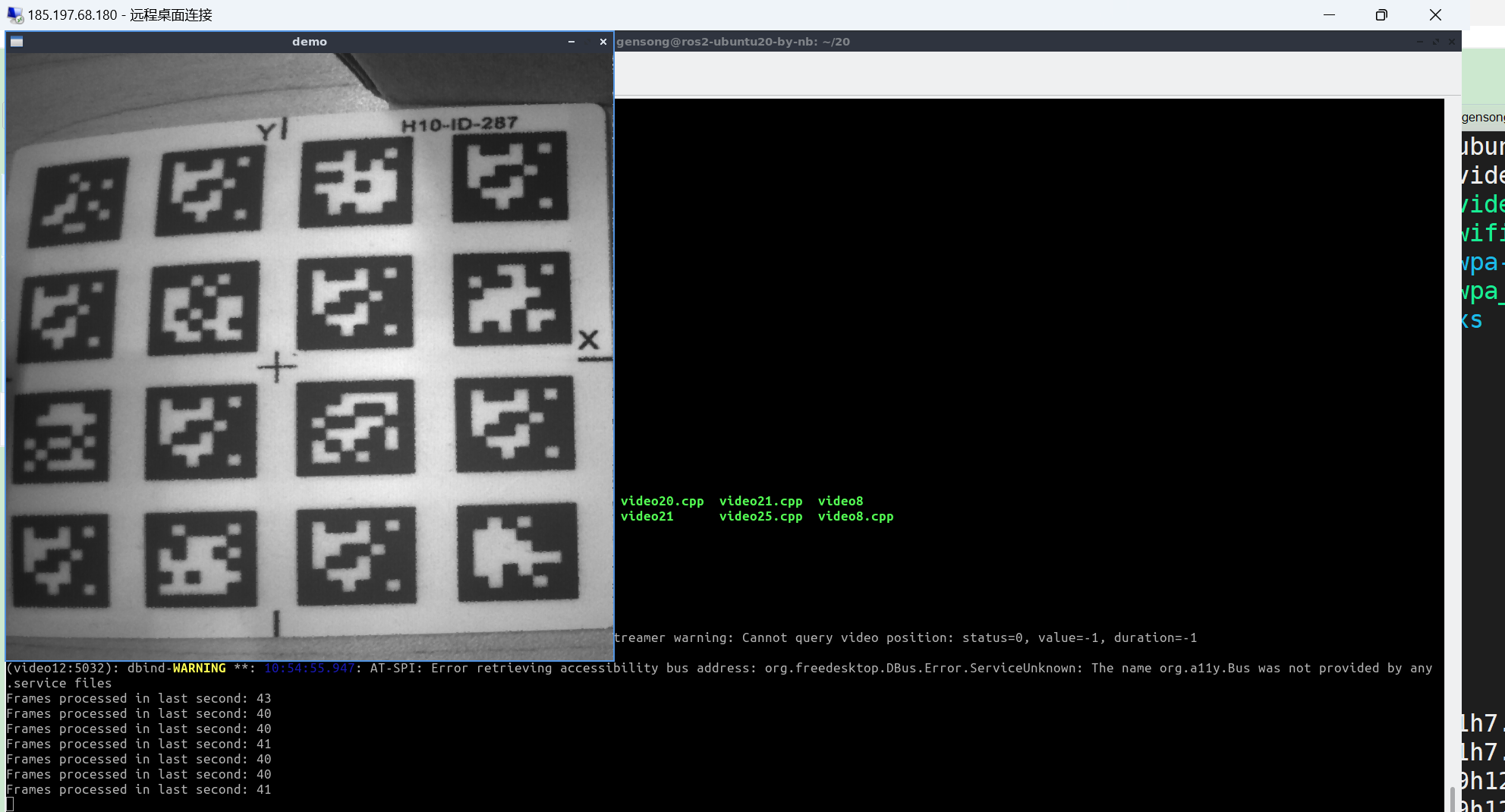
执行编译出来的./video12 800 800 60 得到的图像。像是按照4:3拉伸得到的图像, 并不是裁剪出来的800 *800的正方形
-
@nb 我看你执行这两个程序都有报错的提示。
猜测可能你的板子跟我们例程的板子有所不同。具体而言就是是不是/dev/video0和/dev/media0对应着这个相机?
看现象就是ROI没有正确按照你想要的配置进去。你可以用i2c脚本直接读取参数的形式来确认这一点。./mv_mipi_i2c.sh -r -f roi -b your_i2c_bus_numberhttps://wiki.veye.cc/index.php/Mv_mipi_i2c.sh_user_guide#roi.2A
-
@veye_xumm 系统启动后 ,直接用python3 v4l2dev_2_opencv_show_grey.py --width=1440 --height=1088 --fps=60 这个来出图,不做任何ROI裁剪 ,得到的图像,也是有拉伸效果。 所以我觉得 应该不是 后期通过i2c配置ROI导致的。
-
@nb 相机本身并不具备单个方向缩放的能力,你可以尝试参考7.4.3或者7.4.4保存一个图片,然后查看一下。
-
@veye_xumm said in 执行编译出来的./video12 800 800 60 得到的图像。像是按照4:3拉伸得到的图像, 并不是裁剪出来的800 *800的正方形:
7.4.3
好的 我试下 非常感谢你的帮助
-
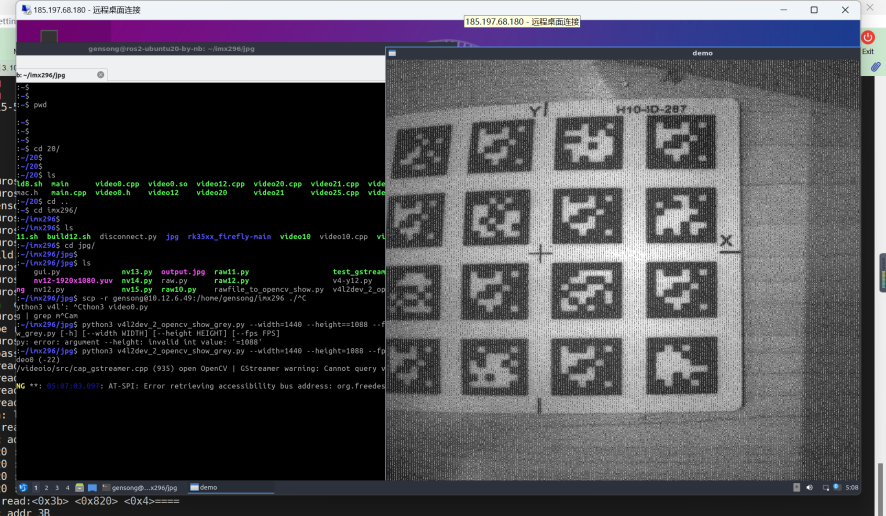
@nb 用这个命令./yavta -c1 -Fy8-${1440}x${1088}.raw --skip 0 -f Y8 -s ${WIDTH}x${HEIGHT} /dev/video0 抓到的raw图像然后转成png后,看到的还是会有拉伸效果
-
@nb
raw8数据可以直接用这个播放器看,不需要转。另外你可以把原始数据文件压缩一下传上来我看看。
https://yuv-player-deluxe.software.informer.com/2.6/ -
@veye_xumm 【有道云笔记】抓图测试raw 文件
https://note.youdao.com/s/J6oOs0K3你好 ,论坛 不支持上传raw文件,我直接把./yavta -c1 -Fy14-${WIDTH}x${HEIGHT}.raw --skip 0 -f Y8 -s ${WIDTH}x${HEIGHT} /dev/video0 用这个命令抓到的文件,上传到自己的有道云笔记上了,然后上面是分享出来的链接。
gensong@ros2-ubuntu20-by-nb:~/yavta-main$ ./yavta -c1 -Fy14-${WIDTH}x${HEIGHT}.raw --skip 0 -f Y8 -s ${WIDTH}x${HEIGHT} /dev/video0
Device /dev/video0 opened.
Devicerkcif' onplatform:rkcif-mipi-lvds2' (driver 'rkcif') supports video, capture, with mplanes.
Video format set: Y8 (59455247) 1440x1088 field none, 1 planes:- Stride 1536, buffer size 1671168
Video format: Y8 (59455247) 1440x1088 field none, 1 planes: - Stride 1536, buffer size 1671168
8 buffers requested.
length: 1 offset: 4269494424 timestamp type/source: mono/EoF
Buffer 0/0 mapped at address 0x7f93a9a000.
length: 1 offset: 4269494424 timestamp type/source: mono/EoF
Buffer 1/0 mapped at address 0x7f93902000.
length: 1 offset: 4269494424 timestamp type/source: mono/EoF
Buffer 2/0 mapped at address 0x7f9376a000.
length: 1 offset: 4269494424 timestamp type/source: mono/EoF
Buffer 3/0 mapped at address 0x7f935d2000.
length: 1 offset: 4269494424 timestamp type/source: mono/EoF
Buffer 4/0 mapped at address 0x7f9343a000.
length: 1 offset: 4269494424 timestamp type/source: mono/EoF
Buffer 5/0 mapped at address 0x7f932a2000.
length: 1 offset: 4269494424 timestamp type/source: mono/EoF
Buffer 6/0 mapped at address 0x7f9310a000.
length: 1 offset: 4269494424 timestamp type/source: mono/EoF
Buffer 7/0 mapped at address 0x7f92f72000.
any 0 1671168 B 10294.365447 10294.365674 30.115 fps ts mono/EoF
Captured 1 frames in 0.033432 seconds (29.910778 fps, 0.000000 B/s).
8 buffers released.
这个是抓图时的打印log输出
- Stride 1536, buffer size 1671168
-
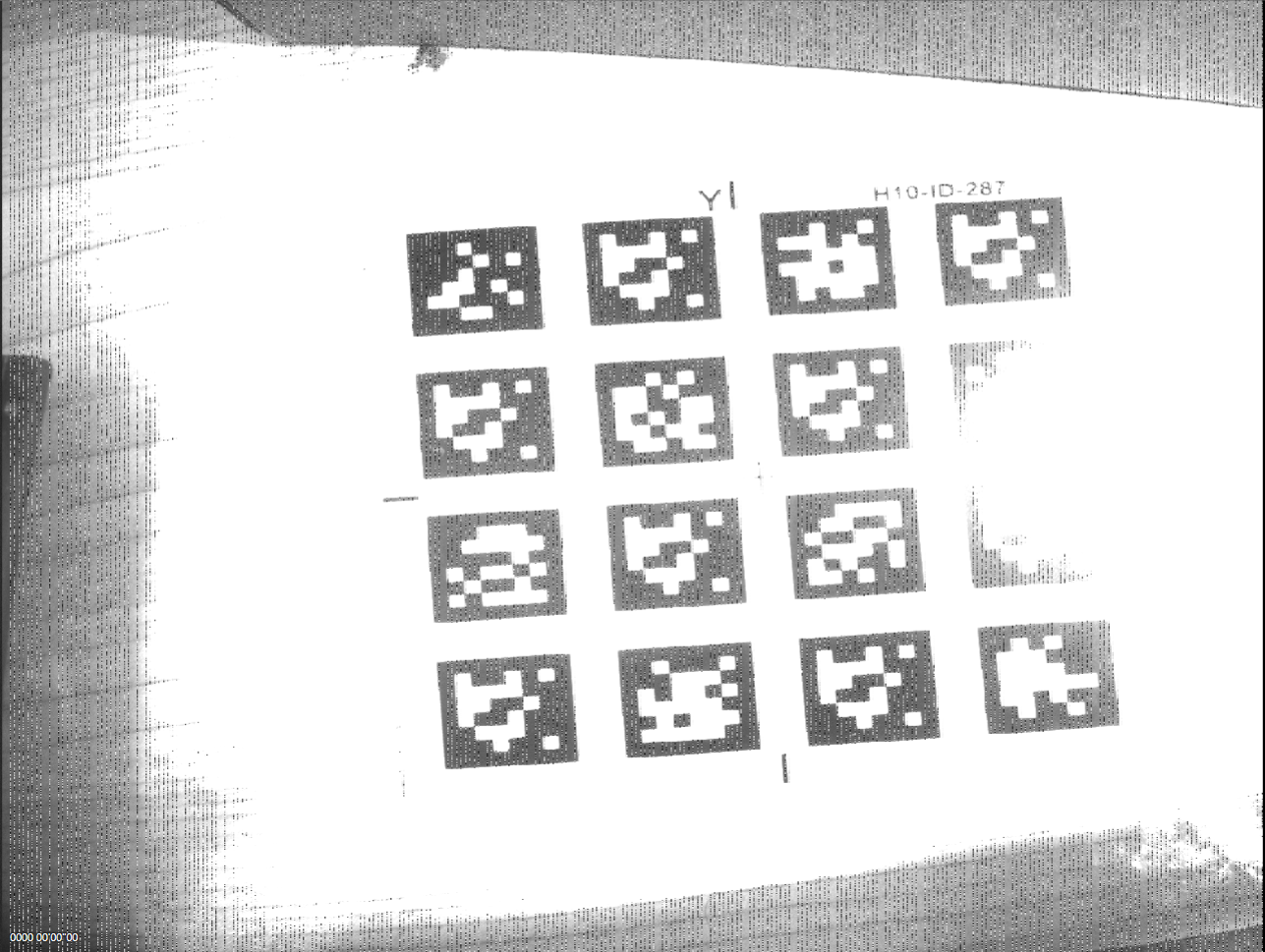
@nb
你这个图片有一些莫名其妙的竖条纹,我觉得相机的输出和你的接收现在是不配套的。你执行./yavta -c1 -Fy14-${WIDTH}x${HEIGHT}.raw --skip 0 -f Y8 -s ${WIDTH}x${HEIGHT} /dev/video0之前设置WIDTH或者HEIGHT等全局变量了吗?
-
@veye_xumm said in 执行编译出来的./video12 800 800 60 得到的图像。像是按照4:3拉伸得到的图像, 并不是裁剪出来的800 *800的正方形:
之前设置WIDTH或者HEIGHT等全局变量了吗?
配置了的 写了个脚本 ,会先执行 source ./set-wh.sh 然后再echo打印看下 ,配置的有没有成功
-
@nb
你的主板应该不是我用的ROC-RK3588S-PC吧?
我怀疑是ROI配置没有配下去。
你现在用这个命令读出来roi配置试试:./mv_mipi_i2c.sh -r -f roi -b your_i2c_bus_number参考:
https://wiki.veye.cc/index.php/Mv_mipi_i2c.sh_user_guide#roi.2A -
@veye_xumm
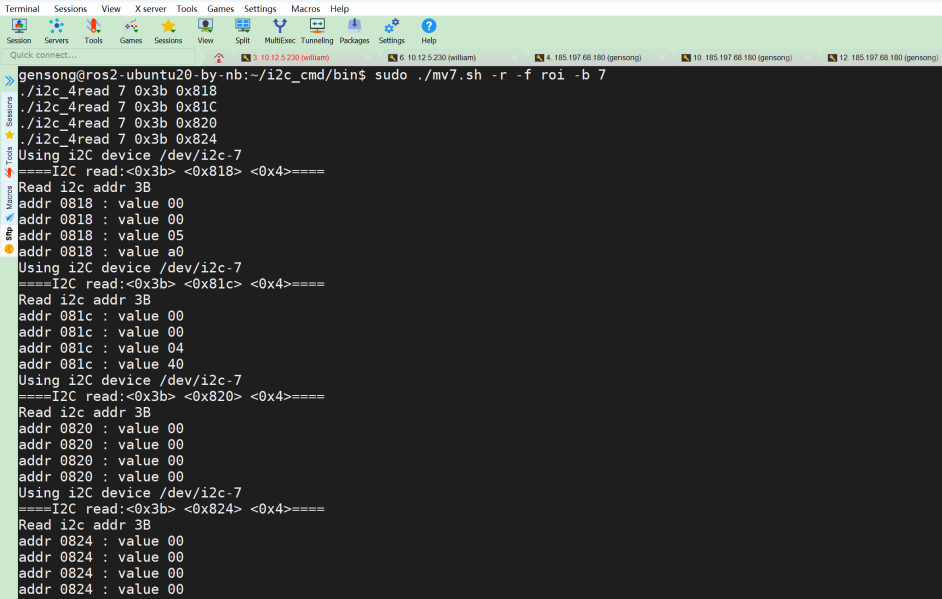
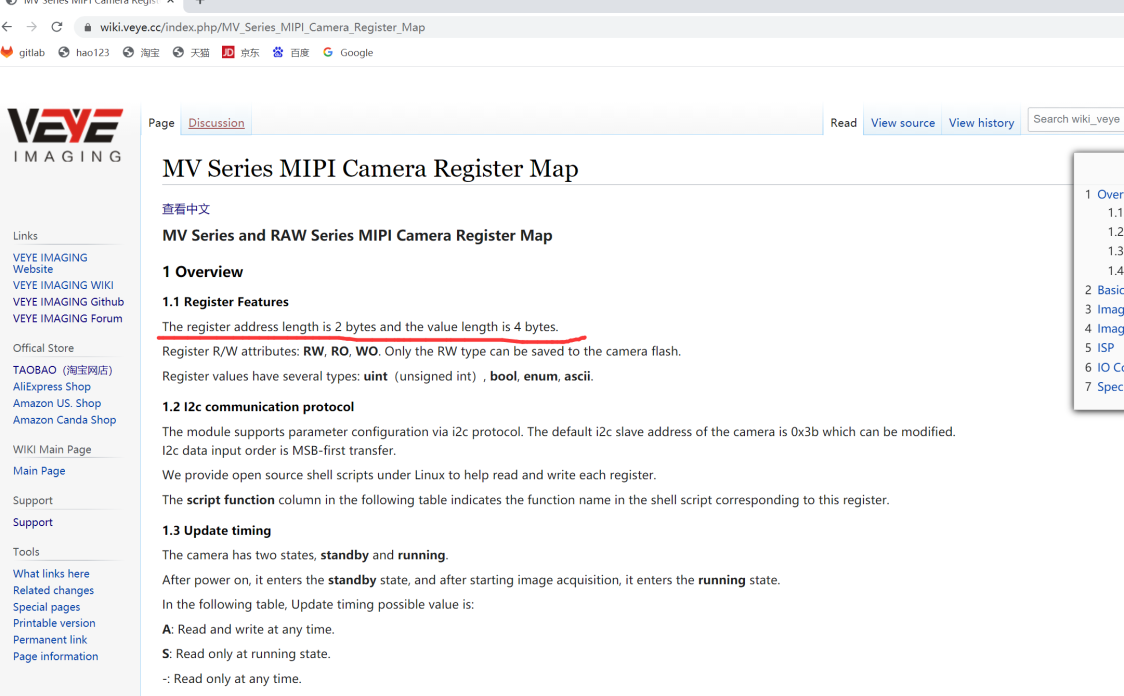
这里得到的结果是0x05a0(1440) 0x0440(1088)你之前提供的脚本是2字节读写的,应该不对, 我做了些调整,改正4字节读写了
-
@nb 我们是用 RK3588自己做的底板
-
@veye_xumm 我有一个怀疑的点。是驱动里日志打印来看这里获取到最大值mvcam: mvcam_probe: max width 1456; max height 1088
后 然后接着就是读取ROI, mvcam: mvcam_getroi:get roi(0,0,1440,1088)但是我并没有从驱动代码里找到 有设置ROI为14401088的地方,麻烦能告诉一下驱动里设置ROI为14401088的代码在哪里吗, 我想把驱动代码里设置ROI为1440*1088的代码给注释掉试试。
-
@nb said in 执行编译出来的./video12 800 800 60 得到的图像。像是按照4:3拉伸得到的图像, 并不是裁剪出来的800 *800的正方形:
你之前提供的脚本是2字节读写的,应该不对, 我做了些调整,改正4字节读写了
我们提供的脚本没问题,直接make一下之后调用就可以。
你分别执行一下这两个命令,贴上来结果我看一下:
v4l2-ctl -d /dev/v4l-subdev2 -L media-ctl -p -d /dev/media0 -
@veye_xumm said in 执行编译出来的./video12 800 800 60 得到的图像。像是按照4:3拉伸得到的图像, 并不是裁剪出来的800 *800的正方形:
分别执行一下这两个命令,贴上来
gensong@ros2-ubuntu20-by-nb:~/20$ v4l2-ctl -d /dev/v4l-subdev2 -L
User Controls
trigger_mode 0x00981901 (int) : min=0 max=2 step=1 default=0 value=0 flags=grabbed, volatile, execute-on-write trigger_src 0x00981902 (int) : min=0 max=1 step=1 default=1 value=1 flags=grabbed, volatile, execute-on-write soft_trgone 0x00981903 (button) : flags=write-only, execute-on-write frame_rate 0x00981904 (int) : min=0 max=60 step=1 default=60 value=60 flags=grabbed, volatile, execute-on-write roi_x 0x00981905 (int) : min=0 max=1376 step=8 default=0 value=0 flags=grabbed roi_y 0x00981906 (int) : min=0 max=1024 step=4 default=0 value=0 flags=grabbedImage Processing Controls
link_frequency 0x009f0901 (intmenu): min=0 max=0 default=0 value=0 0: 750000000 (0x2cb41780) pixel_rate 0x009f0902 (int64) : min=750000000 max=750000000 step=1 default=750000000 value=750000000 flags=read-onlygensong@ros2-ubuntu20-by-nb:~/20$
-
-
@nb 看起来你的配置没有问题。
有没有可能是硬件的问题?你试过ROC-RK3588S-PC主板上的结果吗? -
@veye_xumm 我们这边 没有ROC-RK3588S-PC 这个硬件,
我觉得 可以再往前面排查一步, 就是模组 出图Max width是1536 Height是1088然后不知道哪里给设置ROI 设置成了1440 和1088 我想知道 这一步是在哪里设置的。 会不会就是这一步设置成1440 *1088的时候 被拉伸了。
-
@nb 其实用mv_mipi_i2c.sh这个脚本,就是直接读取和写camera寄存器的,是最底层也最直接的操作。
驱动层面只是封装了对寄存器的读写而已。
但是你说你的板子上mv_mipi_i2c.sh不行,我觉得很奇怪。这里得到的结果是0x05a0(1440) 0x0440(1088)
根据你自己的修改过的脚本,相机端读到的roi数据是跟3588板子上的驱动中的值是一致的。
因此我才怀疑是不是硬件的问题。
-
@veye_xumm 硬件哪方面会导致这样的问题呢 ,可否提供一下排查思路,或者需要我们这边怎么配合你 来排查硬件呢?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login