移植MV-IMX265驱动程序到迅为RK3568抓图卡死


-
@veye_xumm
1.我给3568接了鼠标和键盘,调用操作系统的终端dmesg,未发现报错,打印信息和串口卡住之前的一样。
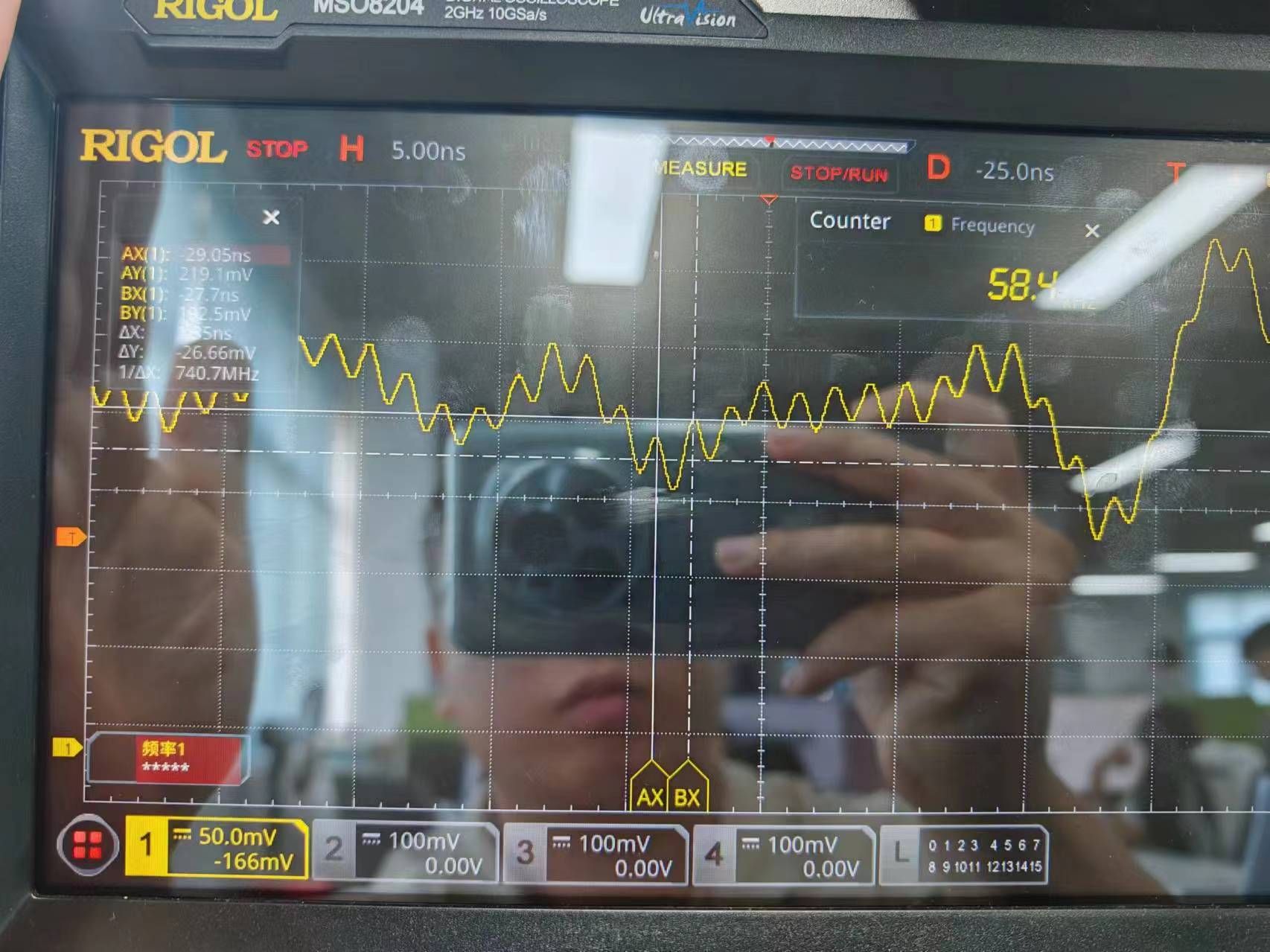
我看了一下mipi_clk信号,频率是740MHZ,峰峰值只有26mv左右。这个会不会有问题,我的OV5695的mipi_clk峰峰值大概有46mv。2.关于link_freq和pixel_freq我有一个疑问
我的0v2710:OV2710_PIXEL_RATE=80 M
OV2710_LINK_FREQ=400M
我的ov5695:OV5695_PIXEL_RATE=180M
OV5695_LINK_FREQ=420M
这俩都满足这个公式
pixel_rate = link_freq * 2 * lanes / bits_per_pixelmv-imx265的驱动中:MV_CAM_PIXEL_RATE=750M
MVCAM_DEFAULT_LINK_FREQ =742.5M
明显是不满足公式
pixel_rate=link_freq * 2 * lanes / bits_per_pixel在这里有没有可能有问题?
 =
= -
@w88121446 said in 移植MV-IMX265驱动程序到迅为RK3568抓图卡死:
我看了一下mipi_clk信号,频率是740MHZ,峰峰值只有26mv左右。这个会不会有问题,我的OV5695的mipi_clk峰峰值大概有46mv。
2.关于link_freq和pixel_freq我有一个疑问
我的0v2710:OV2710_PIXEL_RATE=80 M
OV2710_LINK_FREQ=400M
我的ov5695:OV5695_PIXEL_RATE=180M
OV5695_LINK_FREQ=420M
这俩都满足这个公式
pixel_rate = link_freq * 2 * lanes / bits_per_pixel
mv-imx265的驱动中:MV_CAM_PIXEL_RATE=750M
MVCAM_DEFAULT_LINK_FREQ =742.5M
明显是不满足公式
pixel_rate=link_freq * 2 * lanes / bits_per_pixel
在这里有没有可能有问题?这些都是没问题的。现在我们全系列的MV系列相机和RAW系列都已经接如果firefly、radxa的rk3568板子。
不过,我们在这两个板子上都是用的kernel5.10的。
我仔细回忆了一下,当初我们最早曾尝试在firefly板子上做过基于4.19的版本的取图,现象跟你现在的现象一样,不出图也不报错。后来firefly发布了5.10版本的bsp,我们就转到5.10版本了。 -
@veye_xumm 我先弄个5.10试试,不过对我这边很麻烦,还关系到其他同事。4.19还有抢救的希望吗?
-
@w88121446 这个我这边不清楚,没法给你有效的参考信息。
-
@veye_xumm 您好,我现在在5.10的内核中可以正确发现MV-IMX265了。目前遇到两个问题
1.是发送《v4l2-ctl -L》
回复如下图,不回复FPS等信息了

2.是发送《v4l2-ctl --set-ctrl frame_rate=10》设置帧率是会报错

请您指点一下
-
@w88121446
配参数应该配置到/dev/v4l-subdev2 吧?
你可以参考参考part7.2 -
@veye_xumm 图像可以采集出来了,想实时预览的话有什么办法吗?
-
@w88121446 said in 移植MV-IMX265驱动程序到迅为RK3568抓图卡死:
@veye_xumm 图像可以采集出来了,想实时预览的话有什么办法吗?
我们wiki上面提到一个python脚本,可以做预览,你可以参考一下。
-
@veye_xumm 暂时没有python环境,我尝试使用gstreamer里的脚本预览
设置成这样:media-ctl -d /dev/media0 --set-v4l2 '"m00_b_mvcam 2-003b":0[fmt:Y8_1X8/2048x1544@1/30]'
然后再预览:gst-launch-1.0 v4l2src device=/dev/video1 io-mode=4 ! queue ! video/x-raw,format=NV12,width=2048,height=1544,framerate=30/1 ! glimagesink
出来的图颜色不对,有时绿有时粉,方向也不时我想要的,该如何旋转。如果设置成这样:media-ctl -d /dev/media0 --set-v4l2 '"m00_b_mvcam 2-003b":0[fmt:UYVY8_2X8/2048x1544@1/30]'
然后再预览:gst-launch-1.0 v4l2src device=/dev/video1 io-mode=4 ! queue ! video/x-raw,format=NV12,width=2048,height=1544,framerate=30/1 ! glimagesink
不出图。麻烦您指导一下,我的模块是MV-IMX265
-
@w88121446
对于只支持单色RAW8格式的camera,直接通过gstreamer进行预览,我们现在觉得支持度不够。
建议你还是用python调用一下opencv跑一下,这个是最简单的。 -
@veye_xumm 好的,感谢您的帮助。
-
@w88121446 不客气
-
@veye_xumm 用C++调用OPENCV也可以预览到正常的图像把。
-
@w88121446
应该没问题的。 不过我们缺乏应用层尤其是opencv的经验。 我理解是python调用opencv能预览,用c++应该就可以。
opencv的主要问题是效率问题,数据导入到opencv的时候需要用cpu跑一次数据格式转换。 -
@veye_xumm 我用《v4l2dev_2_opencv_show_grey.py》这个文件,报错camera open failed.
麻烦指导一下 -
@w88121446
是参考我们在rk平台的这个python程序吗? 能否截图看一下具体错误?
/dev/video0是否存在? -
@veye_xumm /dev/video0确认存在的,用的下面这个PY脚本
import sys import argparse import subprocess import cv2 def read_cam(width, height, fps,i2c): v4l2_cmd = f'media-ctl -d /dev/media0 --set-v4l2 \'"m00_b_mvcam 2-003b":0[fmt:Y8_1X8/{width}x{height}@1/{fps} field:none]\'' subprocess.run(v4l2_cmd, shell=True) cap = cv2.VideoCapture(f"v4l2src io-mode=dmabuf device=/dev/video0 ! video/x-raw, format=(string)GRAY8, width=(int){width}, height=(int){height} ! appsink") if cap.isOpened(): cv2.namedWindow("demo", cv2.WINDOW_AUTOSIZE) while True: ret_val, img = cap.read(); cv2.imshow('demo',img) cv2.waitKey(1) else: print ("camera open failed"); cv2.destroyAllWindows() if __name__ == '__main__': parser = argparse.ArgumentParser(description='Read camera video stream') parser.add_argument('--width', type=int, default=1080, help='width of the video stream') parser.add_argument('--height', type=int, default=1080, help='height of the video stream') parser.add_argument('--fps', type=int, default=30, help='fps of the video stream') parser.add_argument('--i2c', type=int, default=7, help='i2c bus number') args = parser.parse_args() read_cam(args.width, args.height, args.fps, args.i2c)报错如下
-
@w88121446 调用的时候参数是怎么写的? i2cbus写对了吗?
-
@veye_xumm
我是这么写的,我的I2C用的I2C2,产品分辨率2048*1544import sys import argparse import subprocess import cv2 def read_cam(width, height, fps,i2c): v4l2_cmd = f'media-ctl -d /dev/media0 --set-v4l2 \'"m00_b_mvcam {i2c}-003b":0[fmt:Y8_1X8/{width}x{height}@1/{fps} field:none]\'' subprocess.run(v4l2_cmd, shell=True) cap = cv2.VideoCapture(f"v4l2src io-mode=dmabuf device=/dev/video0 ! video/x-raw, format=(string)GRAY8, width=(int){width}, height=(int){height} ! appsink") if cap.isOpened(): cv2.namedWindow("demo", cv2.WINDOW_AUTOSIZE) while True: ret_val, img = cap.read(); cv2.imshow('demo',img) cv2.waitKey(1) else: print ("camera open failed"); cv2.destroyAllWindows() if __name__ == '__main__': parser = argparse.ArgumentParser(description='Read camera video stream') parser.add_argument('--width', type=int, default=2048, help='width of the video stream') parser.add_argument('--height', type=int, default=1544, help='height of the video stream') parser.add_argument('--fps', type=int, default=30, help='fps of the video stream') parser.add_argument('--i2c', type=int, default=2, help='i2c bus number') args = parser.parse_args() read_cam(args.width, args.height, args.fps, args.i2c) -
@w88121446 不好意思我没有说清楚,我的意思是,你调用这个脚本的时候,使用的命令行是什么?参数是什么?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login